Единичный вектор - Unit vector
В математика, а единичный вектор в нормированное векторное пространство это вектор (часто пространственный вектор ) из длина 1. Единичный вектор часто обозначается строчной буквой с циркумфлекс, или "шляпа", как в (произносится как «в-шляпа»).[1][2]

Период, термин вектор направления используется для описания единичного вектора, используемого для представления пространственного направления, и такие величины обычно обозначаются как d; Представленные таким образом двумерные пространственные направления численно эквивалентны точкам на единичный круг Эта же конструкция используется для указания пространственных направлений в 3D, которые эквивалентны точке на единичная сфера.


В нормализованный вектор û ненулевого вектора ты - единичный вектор в направлении ты, т.е.

где |ты| это норма (или длина) ты.[3][4] Период, термин нормализованный вектор иногда используется как синоним единичный вектор.
Единичные векторы часто выбираются для формирования основа векторного пространства, и каждый вектор в пространстве может быть записан как линейная комбинация единичных векторов.
По определению скалярное произведение двух единичных векторов в Евклидово пространство - скалярное значение, равное косинус меньшего прилегающего угла. В трехмерном евклидовом пространстве перекрестное произведение из двух произвольных единичных векторов является третьим вектором, ортогональным им обоим, длина которого равна синусу меньшего прилегающего угла. Нормализованное перекрестное произведение корректирует эту изменяющуюся длину и дает взаимно ортогональный единичный вектор для двух входных данных, применяя правило правой руки разрешить одно из двух возможных направлений.
Ортогональные координаты
Декартовы координаты
Единичные векторы могут использоваться для представления осей Декартова система координат. Например, стандартные единичные векторы в направлении Икс, у, и z оси трехмерной декартовой системы координат равны

Они образуют совокупность взаимно ортогональный единичные векторы, обычно называемые стандартная основа в линейная алгебра.
Их часто обозначают с использованием общепринятых векторных обозначений (например, я или ) вместо стандартной записи единичного вектора (например, ). В большинстве случаев можно предположить, что я, j, и k, (или и ) являются версорами трехмерной декартовой системы координат. Обозначения , , , или , с или без шапка, также используются,[3] особенно в условиях, когда я, j, k может привести к путанице с другим количеством (например, с показатель символы, такие как я, j, k, которые используются для идентификации элемента набора, массива или последовательности переменных).









Когда единичный вектор в пространстве выражается в Декартова запись как линейная комбинация я, j, k, его три скалярные компоненты можно обозначить как направляющие косинусы. Значение каждого компонента равно косинусу угла, образованного единичным вектором - с соответствующим базисным вектором. Это один из методов, используемых для описания ориентация (угловое положение) прямой, отрезка прямой, ориентированной оси или отрезка ориентированной оси (вектор ).
Цилиндрические координаты
Три ортогональный единичные векторы, соответствующие цилиндрической симметрии:
- (также обозначенный или ), представляющий направление, вдоль которого измеряется расстояние точки от оси симметрии;
- , представляющий направление движения, которое наблюдалось бы, если бы точка вращалась против часовой стрелки вокруг ось симметрии;
- , представляющий направление оси симметрии;





Они связаны с декартовым основанием , , от:



- =

- =


Важно отметить, что и являются функциями , и являются не постоянное направление. При дифференцировании или интегрировании в цилиндрических координатах необходимо работать с самими единичными векторами. Для более полного описания см. Матрица якобиана. Производные по находятся:




Сферические координаты
Единичные векторы, соответствующие сферической симметрии, следующие: , направление увеличения радиального расстояния от начала координат; , направление, в котором угол в Икс-у плоскость против часовой стрелки от положительного Икс- ось увеличивается; и , направление, в котором угол от положительного z ось увеличивается. Для минимизации избыточности представлений полярный угол обычно лежит в диапазоне от нуля до 180 градусов. Особенно важно отметить контекст любого упорядоченного триплета, написанного на сферические координаты, как роли и часто меняются местами. Здесь американская "физическая" конвенция[5] используется. Это оставляет азимутальный угол определяется так же, как в цилиндрических координатах. В Декартово отношения:






Сферические единичные векторы зависят как от и , и, следовательно, есть 5 возможных ненулевых производных. Для более полного описания см. Матрица Якоби и определитель. Ненулевые производные:





Общие единичные векторы
Общие темы единичных векторов встречаются повсюду физика и геометрия:[6]
| Единичный вектор | Номенклатура | Диаграмма |
|---|---|---|
| Касательный вектор к кривой / линии потока |  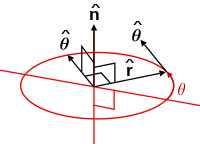 Нормальный вектор на плоскость, содержащую и определяемую вектором радиального положения и угловое тангенциальное направление вращения необходимо, чтобы выполнялись векторные уравнения углового движения. | |
| Нормально к касательной плоскости / плоскости, содержащей компонент радиального положения и угловой тангенциальный компонент | С точки зрения полярные координаты; | |
| Бинормальный вектор к касательной и нормали | [7] | |
| Параллельно какой-то оси / линии | 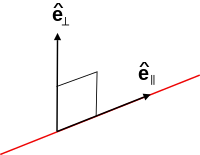 Один единичный вектор выровнен параллельно главному направлению (красная линия) и перпендикулярному единичному вектору находится в любом радиальном направлении относительно главной линии. | |
| Перпендикулярно некоторой оси / линии в некотором радиальном направлении | ||
| Возможное угловое отклонение относительно некоторой оси / линии | 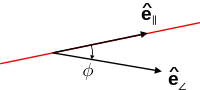 Единичный вектор при остром угле отклонения φ (включая 0 или π/ 2 рад) относительно главного направления. |









Криволинейные координаты
В общем, система координат может быть однозначно указана с использованием ряда линейно независимый единичные векторы [3] (фактическое число равно степеням свободы пространства). Для обычного 3-мерного пространства эти векторы можно обозначить . Почти всегда удобно определять систему как ортонормированную и правша:




где это Дельта Кронекера (что равно 1 для я = j, и 0 в противном случае) и это Символ Леви-Чивита (который равен 1 для перестановок, упорядоченных как ijk, и −1 для перестановок, упорядоченных как кджи).


Правый противник
Единичный вектор в ℝ3 был назван правильный ответчик от В. Р. Гамильтон, поскольку он развивал кватернионы ℍ ⊂ ℝ4. Фактически, он был создателем термина вектор, как и каждый кватернион имеет скалярную часть s и векторная часть v. Если v является единичным вектором в ℝ3, то квадрат v в кватернионах равно –1. Таким образом Формула Эйлера, это Versor в 3-сфера. Когда θ является прямой угол, версор является правым версором: его скалярная часть равна нулю, а его векторная часть v является единичным вектором в ℝ3.


Смотрите также
- Декартова система координат
- Система координат
- Криволинейные координаты
- Четырехскоростной
- Матрица Якоби и определитель
- Нормальный вектор
- Полярная система координат
- Стандартная основа
- Единичный интервал
- Единица измерения квадрат, куб, круг, сфера, и гипербола
- Векторное обозначение
- Вектор из них
Примечания
- ^ «Исчерпывающий список символов алгебры». Математическое хранилище. 2020-03-25. Получено 2020-08-19.
- ^ "Единичный вектор". www.mathsisfun.com. Получено 2020-08-19.
- ^ а б c Вайсштейн, Эрик В. "Единичный вектор". mathworld.wolfram.com. Получено 2020-08-19.
- ^ "Единичные векторы | Блестящая вики по математике и науке". brilliant.org. Получено 2020-08-19.
- ^ Тевиан Дрей и Корин А. Маног, Сферические координаты, College Math Journal 34, 168–169 (2003).
- ^ Ф. Эйрес; Э. Мандельсон (2009). Исчисление (серия очерков Шаума) (5-е изд.). Мак Гроу Хилл. ISBN 978-0-07-150861-2.
- ^ М. Р. Шпигель; С. Липшуц; Д. Спеллман (2009). Векторный анализ (серия набросков Шаума) (2-е изд.). Мак Гроу Хилл. ISBN 978-0-07-161545-7.
использованная литература
- Г. Б. Арфкен и Х. Дж. Вебер (2000). Математические методы для физиков (5-е изд.). Академическая пресса. ISBN 0-12-059825-6.
- Шпигель, Мюррей Р. (1998). Очерки Шаума: Математический справочник формул и таблиц (2-е изд.). Макгроу-Хилл. ISBN 0-07-038203-4.
- Гриффитс, Дэвид Дж. (1998). Введение в электродинамику (3-е изд.). Прентис Холл. ISBN 0-13-805326-X.