Передвижение рыб - Fish locomotion

Передвижение рыб это разнообразие видов передвижение животных использован рыбы, в основном плавание. Однако это достигается у разных групп рыб за счет различных механизмов движения в воды, чаще всего волнообразными движениями тела и хвоста рыб, а у различных специализированных рыб - движениями плавники. Основные формы передвижения у рыб - угловатые, при которых волна равномерно проходит по длинному тонкому телу; sub-carangiform, у которого волна быстро нарастает по амплитуде к хвосту; панцирная форма, у которой волна сосредоточена около хвоста, который быстро колеблется; грозовидная, быстрое плавание с большим мощным серповидным хвостом; остраковидные, почти без колебаний, за исключением хвостового плавника. Более специализированные рыбы включают движение грудных плавников с в основном жестким телом, как у солнечной рыбы; и движение за счет распространения волны вдоль длинных плавников с неподвижным телом у рыб с электрическими органами, такими как рыба-нож.
Кроме того, некоторые рыбы могут по-разному "ходить", то есть перемещаться по суше, норка в грязи, и скользить по воздуху.
Плавание
- Плавники, используемые для передвижения
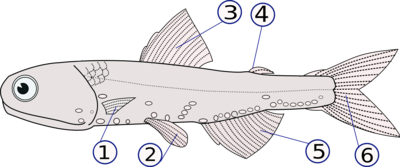 (1) грудные плавники (парные), (2) тазовые плавники (парные), (3) спинной плавник,
(1) грудные плавники (парные), (2) тазовые плавники (парные), (3) спинной плавник,
(4) жировой плавник, (5) анальный плавник, (6) хвостовой (хвостовой) плавник

Рыба плавает, оказывая давление на окружающую воду. Есть исключения, но обычно это достигается за счет сокращения рыбы. мышцы по обе стороны от его тела, чтобы генерировать волны сгибание которые проходят по длине тела от носа до хвоста, обычно становясь больше по мере продвижения. В вектор силы оказываемое на воду таким движением компенсируется в боковом направлении, но создает результирующую силу назад, которая, в свою очередь, толкает рыбу вперед по воде. Большинство рыб создают тягу, используя боковые движения своего тела и хвостовой плавник, но многие другие виды передвигаются в основном с помощью своих срединных и парных плавников. Последняя группа плавает медленно, но может быстро поворачиваться, что необходимо, например, при жизни в коралловых рифах. Но они не могут плавать так быстро, как рыбы, используя свое тело и хвостовой плавник.[1][2]
Движение тела / хвостового плавника
Выделяют пять групп, которые различаются долей тела, смещенной вбок:[1]
Угловатая форма

В группе anguilliform, содержащей несколько длинных, тонких рыб, таких как угри, амплитуда волны сгибания при ее прохождении по телу увеличивается незначительно.[1][3]
Подкаранжеформа
Группа подчехловидных имеет более выраженное увеличение амплитуды волн вдоль тела, при этом подавляющая часть работы выполняется задней половиной рыбы. В целом, тело рыбы более жесткое, что обеспечивает более высокую скорость, но снижает маневренность. Форель использовать подкожные движения.[1]
Carangiform
Группа Carangiform, названная в честь Carangidae, являются более жесткими и подвижными, чем предыдущие группы. Подавляющее большинство движений сосредоточено в самой задней части тела и хвоста. У пловцов Каранжеобразной формы обычно быстро колеблющийся хвост.[1]
Thunniform

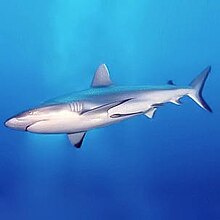
Группа thunniform включает быстроходных пловцов на длинные дистанции и характерна для тунец[4] а также встречается в нескольких ламнид акулы.[5] Здесь практически все боковые движения происходят в хвосте и в области, соединяющей основное тело с хвостом (стебель). Сам хвост обычно большой и имеет форму полумесяца.[1] Эта форма плавания позволяет этим рыбам легче преследовать и ловить добычу из-за увеличения скорости плавания, как у барракуд.[6]
Остракиформный
Группа остракиформ не имеет заметной волны тела, когда они используют каудальное движение. Только хвостовой плавник колеблется (часто очень быстро), создавая толчок. В эту группу входят Ostraciidae.[1]
Срединный / парный движитель

Не все рыбы подходят для перечисленных выше групп. Океанская солнечная рыба, например, имеют совершенно другую систему, режим тетраодонтиформ, и многие мелкие рыбки используют свои грудные плавники для плавания, а также для рулевого управления и динамический подъем. Рыба с электрическими органами, например, у рыбы-ножа (Gymnotiformes ), плавают, покачивая своими очень длинными плавниками, сохраняя при этом тело неподвижным, предположительно, чтобы не нарушать создаваемое ими электрическое поле.
Многие рыбы плавают, используя совместное поведение двух рыб. грудные плавники или оба их анальный и спинной плавники. Различные типы Срединный движитель с парными плавниками может быть достигнута путем предпочтительного использования одной пары плавников по сравнению с другой и включает в себя режимы rajiform, diodontiform, amiiform, gymnotiform и balistiform.[2]
Раджиформ
Раджиформное передвижение характерно для лучи, коньки, и манты когда толчок производится вертикальными волнами вдоль крупных, хорошо развитых грудных плавников.[2]
Диодонтиформ

Движение Diodontiform заставляет рыбу распространяться волнообразными движениями вдоль больших грудных плавников, как это было у рыбы-дикобраза (Diodontidae ).[2]
Amiiform
Амиформное передвижение состоит из волнообразных движений длинного спинного плавника, при этом ось тела остается прямой и стабильной, как показано на рисунке. Bowfin.[2]
Gymnotiform

Передвижение Gymnotiform состоит из волнообразных движений длинного анального плавника, по существу перевернутого вверх ногами, как у рыбы-ножа (Gymnotiformes ).[2]
Балистиформ
При передвижении балистиформных плавников и анальный, и спинной плавники волнообразны. Это характерно для семейства Balistidae (спинороговые рыбы). Это также можно увидеть в Zeidae.[2]
Колебательный
Колебания рассматриваются как плавание на основе грудных плавников и наиболее известны как подвижные движения. Движение можно описать как создание менее половины волны на плавнике, похожее на взмах крыльев птицы. Пелагические скаты, такие как манты, скаты, орлы и летучие мыши, используют колебательные движения.[7]
Тетраодонтиформ
При передвижении у тетраодонтиформ спинной и анальный плавники хлопают как единое целое, либо синхронно, либо точно напротив друг друга, как показано на рисунке. Tetraodontiformes (самшит и фугу ). В океанская солнечная рыба показывает крайний пример этого режима.[2]
Лабриформ
При передвижении лабриформ, наблюдаемых у губанов (Labriformes ) колебательные движения грудных плавников основаны либо на лобовом сопротивлении, либо на подъемной силе. Движущая сила создается либо как реакция на сопротивление, возникающее при протаскивании плавников по воде при гребле, либо с помощью подъемных механизмов.[2][8]
Динамический подъем
Костные и мышечные ткани рыб плотнее воды. Для сохранения глубины костные рыбки увеличивают плавучесть с помощью газовый пузырь. В качестве альтернативы, немного рыбы хранить масла или липиды для той же цели. Рыба без этих функций использует динамический подъем вместо. Это делается с помощью их грудных плавников, аналогично тому, как это делается с помощью крыльев. самолеты и птицы. Когда эти рыбы плавают, их грудные плавники расположены так, чтобы создавать лифт что позволяет рыбе сохранять определенную глубину. Двумя основными недостатками этого метода являются то, что эти рыбы должны двигаться, чтобы оставаться на плаву, и что они не могут плавать назад или зависать.[9][10]
Гидродинамика
Подобно аэродинамике полета, плавание с двигателем требует, чтобы животные преодолевали сопротивление, создавая тягу. Однако, в отличие от полета, плавающим животным часто не требуется прикладывать большую вертикальную силу, потому что эффект плавучесть может противостоять нисходящей гравитации, позволяя этим животным плавать без особых усилий. Хотя существует большое разнообразие движений рыб, плавательное поведение можно разделить на два различных «режима» в зависимости от структур тела, участвующих в создании тяги: срединно-парный плавник (MPF) и тело-хвостовой плавник (BCF). Внутри каждой из этих классификаций есть множество спецификаций по спектру поведения чисто волнообразный полностью колебательный. В волнообразных режимах плавания тяга создается волнообразными движениями движущей конструкции (обычно плавника или всего тела). Колебательные режимы, с другой стороны, характеризуются тягой, создаваемой поворотом движительной конструкции в точке крепления без какого-либо волнообразного движения.[2]
Тело-хвостовой плавник

Большинство рыб плавают, создавая волнообразные волны, которые распространяются вниз по телу через хвостовой плавник. Эта форма волнообразное движение Называется тело-хвостовой плавник (BCF) плавание на основе используемых структур тела; он включает углеподобный, субчехловидный, каранжеобразный и грозообразный режимы движения, а также колебательный остракиформный режим.[2][11]
Приспособление
Подобно адаптации в птичьем полете, плавательное поведение рыб можно рассматривать как баланс стабильности и маневренности.[12] Поскольку плавание BCF требует большего каудальный Конструкции тела, которые могут направлять мощную тягу только назад, эта форма передвижения особенно эффективна для быстрого ускорения и непрерывного движения.[2][11] Следовательно, плавание BCF по своей природе стабильно и часто наблюдается у рыб с крупными миграционными структурами, которые должны обеспечивать максимальную эффективность в течение длительных периодов времени. С другой стороны, движущие силы при плавании в режиме MPF генерируются множеством плавников, расположенных по обе стороны тела, которые можно координировать для выполнения сложных поворотов. В результате плавание MPF хорошо приспособлено к высокой маневренности и часто встречается у более мелких рыб, которым требуются тщательно продуманные схемы ухода.[12]
Среда обитания рыб часто связана с их плавательными способностями. На коралловых рифах быстро плавающие виды рыб обычно обитают в подверженных волнам местообитаниях, подверженных быстрому течению воды, в то время как более медленные рыбы живут в защищенных местообитаниях с низким уровнем движения воды.[13]
Рыбы не полагаются исключительно на один локомоторный режим, а скорее являются локомоторными универсалом,[2] выбор и комбинирование моделей поведения из множества доступных поведенческих техник. Пловцы преимущественно BCF часто используют движения своих грудные, анальный и спинной плавники как дополнительный стабилизирующий механизм на более низких скоростях,[14] но держите их близко к телу на высокой скорости, чтобы улучшить рационализация и уменьшение сопротивления.[2] Данио было даже замечено, что они изменяют свое двигательное поведение в ответ на изменение гидродинамических влияний на протяжении роста и созревания.[15]
Помимо адаптации локомоторного поведения, контроль эффектов плавучести имеет решающее значение для выживания в воде, поскольку водные экосистемы сильно различаются по глубине. Рыбы обычно контролируют свою глубину, регулируя количество газа в специализированных органах, которые очень похожи на воздушные шары. Изменяя количество газа в этих плавательные пузыри, рыбы активно контролируют свою плотность. Если они увеличат количество воздуха в своем плавательном пузыре, их общая плотность станет меньше, чем у окружающей воды, а повышенное восходящее давление плавучести заставит рыбу подниматься, пока они не достигнут глубины, на которой они снова будут в равновесии с окружающей водой. .[16]
Рейс
Переход от преимущественно плавательного передвижения непосредственно к полету произошел в одном семействе морских рыб - Exocoetidae. Летучие рыбы не являются настоящими летчиками в том смысле, что они не летают на механизме. Вместо этого эти виды скользят прямо над поверхностью воды океана, даже не взмахивая «крыльями». У летучих рыб появились аномально большие грудные плавники, которые действуют как крылья и обеспечивают подъемную силу, когда рыба вырывается из воды. Дополнительная прямая тяга и управляющие силы создаются путем погружения гипокаудальной (то есть нижней) доли их хвостового плавника в воду и очень быстрой ее вибрации, в отличие от ныряющих птиц, у которых эти силы создаются тем же двигательным модулем, который используется для движения. Из 64 существующих видов летучих рыб существует только два различных строения тела, каждый из которых оптимизирует два разных поведения.[17][18]

Компромиссы
Хотя у большинства рыб хвостовой плавник с лопастями равного размера (т.е. гомокаудальными) летучие рыбы имеют увеличенные вентральный лепесток (т.е. гипокаудальный), который облегчает погружение только части хвоста обратно в воду для дополнительной выработки тяги и управления.[18]
Поскольку летучие рыбы - это прежде всего водные животные, их плотность тела должна быть близка к плотности воды для обеспечения устойчивости плавучести. Однако это основное требование для плавания означает, что летучая рыба тяжелее (имеет большую массу), чем другие привычные летуны, что приводит к более высокой нагрузке на крыло и соотношению подъемной силы и сопротивления у летучей рыбы по сравнению с птицей сопоставимого размера.[17] Различия в площади крыла, размахе крыла, нагрузке на крыло и соотношении сторон были использованы для классификации летучих рыб на две отдельные классификации, основанные на этих различных аэродинамических конструкциях.[17]
План корпуса биплана
в биплан или Cypselurus В плане тела грудные и тазовые плавники увеличены для обеспечения подъемной силы во время полета.[17] У этих рыб также, как правило, более «плоские» тела, которые увеличивают общую площадь подъемной силы, что позволяет им «висеть» в воздухе лучше, чем более обтекаемые формы.[18] В результате такой высокой подъемной силы эти рыбы являются отличными планерами и хорошо приспособлены для увеличения дальности и продолжительности полета.
Сравнительно, Cypselurus у летучих рыб меньшая нагрузка на крылья и меньшее удлинение (т.е. более широкие крылья), чем у их Exocoetus аналоги-монопланы, что способствует их способности летать на большие расстояния, чем рыбы с этим альтернативным строением тела. Летучие рыбы с конструкцией биплана используют преимущества своей способности производить большую подъемную силу при запуске из воды за счет использования "рулежка" в котором гипокаудальная доля остается в воде для создания тяги даже после того, как туловище отрывается от поверхности воды и крылья открываются с небольшим углом атаки для создания подъемной силы.[17]

План кузова моноплана
в Exocoetus или моноплан В плане тела только грудные плавники увеличены для обеспечения подъемной силы. Рыбы с таким строением тела, как правило, имеют более обтекаемое тело, более высокое соотношение сторон (длинные, узкие крылья) и более высокая нагрузка на крыло, чем у рыб с бипланом, что делает эту рыбу хорошо приспособленной для более высоких скоростей полета. Летучие рыбы с телом моноплана демонстрируют отличное поведение при запуске от своих собратьев-бипланов. Вместо того, чтобы увеличивать продолжительность выработки тяги, рыба-моноплан запускается из воды на высоких скоростях под большим углом атаки (иногда до 45 градусов).[17] Таким образом, рыбы-монопланы используют преимущества своей адаптации к высокой скорости полета, в то время как рыбы с конструкцией бипланов используют свои возможности подъемной силы во время взлета.
Гулять пешком

«Ходячая рыба» - это рыба, способная перемещаться земля в течение длительного периода времени. Некоторые другие случаи нестандартного передвижения рыб включают «ходьбу» рыб по морское дно, такой как морская рыба или рыба-лягушка.
Чаще всего ходячие рыбы рыба-амфибия. Будучи способными дольше находиться вне воды, эти рыбы могут использовать ряд средств передвижения, включая прыжки, змееподобные боковые колебания и походку на треножнике. В прыгуны вероятно, являются лучшими из современных рыб, приспособленных к суше, и могут целыми днями выходить из воды и даже лазать мангровые заросли, правда, на скромную высоту.[19] В Восхождение на гурами часто называют «ходячей рыбой», хотя на самом деле она не «ходит», а, скорее, рывками движется, опираясь на выступающие края ее жабры пластины и толкается за плавники и хвост. В некоторых сообщениях указывается, что он также может лазить по деревьям.[20]
Есть несколько рыб, которые не умеют ходить, например, гуляющий сом. Несмотря на то, что эта рыба известна своей «ходьбой по суше», эта рыба обычно извивается и может использовать грудные плавники для помощи в движении. У гуляющего сома есть дыхательная система что позволяет им жить без воды в течение нескольких дней. Некоторые инвазивные виды. Печально известный случай в Соединенные Штаты это Северная змееголов.[21] Полиптериды имеют рудиментарные легкие и могут также передвигаться по суше, хотя и довольно неуклюже. В Мангровые заросли могут месяцами выживать без воды и перемещаться в такие места, как полые бревна.[22][23][24][25]

Есть некоторые виды рыб, которые могут «ходить» по морскому дну, но не по суше; одно такое животное летучая мышь (на самом деле он не летает, и его не следует путать с летучая рыба ). Летучие мыши в семье Ogcocephalidae (не путать с летучей мышью Эфиппиды ) также способны ходить по морскому дну. Батиптероевый граллатор, также известный как «рыба-тренога», стоит на трех плавниках на дне океана и охотится за пропитанием.[26] Африканская двоякодышащая рыба (P. annectens) может использовать свои плавники для "ходить" вдоль дна резервуара, подобно тому, как земноводные и наземные позвоночные используют свои конечности на суше.[27][28][29]
Роющий
Многие рыбы, особенно рыбы в форме угрей, такие как настоящие угри, мурена, и колючие угри, способны роющий через песок или грязь.[30] Офихтиды, змеиные угри, способны копать рыть вперед или назад.[31]
Личинка рыбы
Передвижение
Плавание

Личинки рыб, как и многие взрослые рыбы, плавают волнообразно. Скорость плавания изменяется пропорционально размеру животных, так как более мелкие животные, как правило, плавают с меньшей скоростью, чем более крупные. Плавательный механизм контролируется режимом течения личинок. Число Рейнольдса (Re) определяется как отношение инерционная сила к вязкая сила. На более мелкие организмы больше влияют вязкие силы, такие как трение, и они плавают с меньшим числом Рейнольдса. Более крупные организмы используют большую долю инерционных сил, таких как давление, для плавания при более высоком числе Рейнольдса.[32]
Личинки луко-плавниковых рыб, Актиноптеригии, плавайте в довольно большом диапазоне чисел Рейнольдса (Re ~ 10–900). Это помещает их в промежуточный режим потока, в котором важную роль играют как силы инерции, так и силы вязкости. По мере увеличения размера личинок увеличивается использование сил давления для плавания при более высоких числах Рейнольдса.
Пловцы с волнообразной формой обычно сбрасывают по крайней мере два типа следа: пловцы с угловатой формой сбрасывают связанные вихревые петли, а пловцы с угловатой формой сбрасывают отдельные вихревые кольца. Эти вихревые кольца зависят от формы и расположения задней кромки, с которой излучаются вихри. Эти закономерности зависят от скорости плавания, отношения скорости плавания к скорости волны тела и формы волны тела.[32]
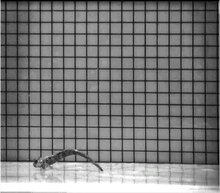
Самопроизвольный заплыв состоит из трех фаз. Первая фаза - это фаза старта или ускорения: на этой фазе личинка имеет тенденцию вращать свое тело, чтобы сделать форму буквы «С», которая называется подготовительным ходом. Затем он толкается в противоположном направлении, чтобы выпрямить свое тело, что называется пропульсивным ударом или силовым ударом, который заставляет личинку двигаться вперед. Второй этап - циклическое плавание. В этой фазе личинка плывет примерно с постоянной скоростью. Последняя фаза - замедление. В этой фазе скорость плавания личинки постепенно замедляется до полной остановки. При подготовительном ударе личинка из-за изгиба тела создает вокруг своего тела 4 вихря, из которых 2 рассеиваются в ходе пропульсивного удара.[32] Подобные явления можно наблюдать в фазе замедления. Однако в вихрях фазы замедления можно увидеть большую область повышенной завихренности по сравнению с начальной фазой.
Плавательные способности личинок рыб важны для выживания. Это особенно верно для личинок рыб с более высокой скоростью метаболизма и меньшего размера, что делает их более уязвимыми для хищников. Способность личинки рифовой рыбы к плаванию помогает ей поселиться на подходящем рифе и найти свой дом, поскольку в поисках пищи она часто изолирована от своего домашнего рифа. Следовательно, скорость плавания личинок рифовых рыб довольно высока (~ 12 см / с - 100 см / с) по сравнению с другими личинками.[33][34] Скорости плавания личинок из одних и тех же семейств в двух местах относительно схожи.[33] Однако различия между людьми довольно велики. На уровне вида длина в значительной степени связана со способностью плавания. Однако на уровне семьи только 16% различий в способностях плавания можно объяснить длиной.[33] Также существует отрицательная корреляция между тонкостью помола.[требуется разъяснение ] и способность плавать личинок рифовых рыб. Это предполагает минимизацию общего сопротивления и максимизацию объема. Личинки рифовых рыб значительно различаются по своим способностям к критической скорости плавания среди таксонов, что приводит к высокой вариабельности устойчивой скорости плавания.[35] Это снова приводит к устойчивой изменчивости их способности изменять характер расселения, общие расстояния расселения и управлять временными и пространственными моделями расселения.[36]
Гидродинамика
Маленькие волнообразные пловцы испытывают как силы инерции, так и силы вязкости, относительная важность которых указывается числом Рейнольдса (Re). Число Рейнольдса пропорционально размеру тела и скорости плавания. Плавательная способность личинки увеличивается через 2–5 дней после оплодотворения (d.p.f.). По сравнению со взрослыми особями, личинки рыб испытывают относительно большую силу вязкости. Чтобы увеличить тягу до уровня взрослых, он увеличивает частоту ударов хвостом и, следовательно, амплитуду. Частота ударов хвостом увеличивается с возрастом личинок до 95 Гц через 3 дня после оплодотворения (d.p.f.) с 80 Гц через 2 дня после оплодотворения (d.p.f.).[требуется разъяснение ] Эта более высокая частота приводит к более высокой скорости плавания, что снижает количество хищников и увеличивает способность ловить добычу, когда они начинают кормиться примерно через 5 дней после оплодотворения (d.p.f.). Механика образования вихрей изменяется обратно нелинейным образом в зависимости от режима течения. Число Рейнольдса (St)[требуется разъяснение ] рассматривается как расчетный параметр для механизма образования вихрей и может быть определен как отношение произведения частоты биений хвоста на амплитуду и средней скорости плавания.[37] Число Рейнольдса (Re) - главный решающий критерий режима течения. В экспериментах с личинками разных типов было замечено, что медленные личинки плавают при более высоком числе Рейнольдса (St), но при более низком числе Рейнольдса (Re). Однако более быстрые личинки отчетливо плавают в противоположных условиях, то есть при меньшем числе Рейнольдса (St), но более высоком числе Рейнольдса (Re). Число Рейнольдса (St) постоянно для взрослых рыб с одинаковым диапазоном скорости. Число Рейнольдса (St) зависит не только от небольшого размера пловцов, но и от режима течения. Как и у рыб, которые плавают в вязком режиме или режиме течения с высоким коэффициентом трения, это создаст высокое сопротивление тела, что приведет к более высокому числу Рейнольдса (St). В то время как в режиме высокой вязкости взрослые особи плавают с меньшей длиной шага, что приводит к меньшей частоте ударов хвостом и меньшей амплитуде. Это приводит к увеличению тяги при таком же смещении или большей движущей силе, что единодушно уменьшает число Рейнольдса (Re).[38]
Личинки рыб начинают кормиться через 5–7 дней после оплодотворения (d.p.f.). И они испытывают крайнюю смертность (~ 99%) в течение нескольких дней после начала кормления. Причина этого «критического периода» (Hjort-1914) в основном связана с гидродинамическими ограничениями. Личинки рыбы не могут есть даже при достаточном количестве встреч с добычей. Одним из основных факторов успеха кормления является размер тела личинки. Личинки меньшего размера функционируют в режиме более низкого числа Рейнольдса (Re). С возрастом размер личинок увеличивается, что приводит к более высокой скорости плавания и увеличению числа Рейнольдса. Во многих экспериментах было замечено, что число Рейнольдса успешных ударов (Re ~ 200) намного выше, чем число Рейнольдса неудачных ударов (Re ~ 20).[39][40] Численный анализ всасывающего кормления при низком числе Рейнольдса (Re) пришел к выводу, что около 40% энергии, вложенной в открывание рта, теряется на силы трения, а не на ускорение жидкости по направлению ко рту.[41] Онтогенетическое улучшение сенсорной системы, координации и переживаний не является значимой взаимосвязью при определении успешности кормления личинок. [40] Успешный удар положительно зависит от максимальной скорости потока или скорости личинок во время удара. Пиковая скорость потока также зависит от скорости раскрытия рта или скорости открытия ротовой полости для захвата пищи. По мере того как личинка стареет, размер ее тела и скорость зевки также увеличиваются, что в совокупности увеличивает успешные результаты удара.[40] Следовательно, более крупные личинки могут схватить более быстро убегающую добычу и приложить достаточную силу, чтобы засосать более тяжелую добычу в рот.
Способность личинки выжить при столкновении с хищником полностью зависит от ее способности чувствовать удар и уклоняться от него. Взрослые рыбы демонстрируют более быстрые удары всасывающим питанием по сравнению с личинками. Чувствительность личинок рыб к полям скорости и потока обеспечивает личинкам критическую защиту от хищников. Хотя многие жертвы используют свою визуальную систему для обнаружения и уклонения от хищников при свете, добыче трудно обнаружить хищников ночью, что приводит к задержке реакции на нападение. У рыб есть механо-сенсорная система, позволяющая идентифицировать различные потоки, создаваемые разными движениями, окружающими воду и между телами, называемыми системой боковой линии.[42] Обнаружив хищника, личинка уклоняется от его удара с помощью «быстрого старта» или реакции «C». Есть и другие водные жертвы, использующие аналогичные системы, например веслоногие рачки, которые ощущают поток воды своими щетинками, расположенными вдоль их антенн; ракообразные используют свое механо-ощущение и как добыча, и как хищник. Плавающая рыба нарушает объем воды перед своим телом со скоростью потока, которая увеличивается по мере приближения к телу. Это конкретное явление иногда можно назвать «волной изгиба».[43] Время начала реакции «C» влияет на вероятность ухода обратно. Вероятность побега увеличивается с удалением от хищника во время удара. В целом жертва успешно уклоняется от удара хищника с среднего расстояния (3–6 мм) от хищника.[42] Добыча могла отреагировать еще до всасывающего кормления, обнаружив генерацию потока приближающегося хищника по реакции испуга. Своевременные маневры побега могут иметь решающее значение для выживания личинок рыб.
- Личинки разных рыб

Атлантическая сельдь яйца, с только что вылупившейся личинкой

Только что вылупившаяся личинка сельди в капле воды по сравнению со спичечной головой.

Поздняя стадия рыба-фонарь личинка

Поздняя стадия длиной 9 мм морская рыба личинка

Личинка морского угря, 7,6 см

Тунец личинка

Тихоокеанская треска личинка

Судак личинка

Осетр обыкновенный личинка

Boxfish личинка

Океанская солнечная рыба личинка, 2,7 мм










Поведение
Объективная количественная оценка затруднена у высших позвоночных из-за сложного и разнообразного локомоторного репертуара и нервной системы.Однако относительная простота мозга молоди и простой нервной системы рыб с фундаментальными нейронными путями позволяет личинкам рыбок данио быть подходящей моделью для изучения взаимосвязи между локомоторным репертуаром и нейрональной системой позвоночных. Поведение представляет собой уникальный интерфейс между внутренними и внешними силами, которые определяют здоровье и выживание организма.[44] Личинки рыбок данио выполняют множество двигательных функций, таких как реакция побега, отслеживание добычи, оптомоторная реакция и т. Д. Это поведение можно классифицировать по положению тела как «C» -старт, «J»-повороты, медленное бегство, рутинные повороты и т.д. реагируют на резкие изменения освещения с отчетливым двигательным поведением. Личинки проявляют высокую двигательную активность в периоды яркого света по сравнению с темнотой. Такое поведение может наводить на мысль о поиске пищи на свету, тогда как личинки не питаются в темноте.[45] Также воздействие света напрямую влияет на двигательную активность личинок в течение циркадного периода света и темноты с более высокой двигательной активностью в светлых условиях, чем в темноте, что очень похоже на то, что наблюдается у млекопитающих. После наступления темноты личинки демонстрируют гиперактивные быстрые движения, а затем постепенно исчезают. Такое поведение могло быть связано с поиском убежища до наступления темноты. Личинки также могут относиться к внезапному наступлению темноты как под обломками, а гиперактивность можно объяснить возвращением личинок в освещенные области.[45] Продолжительный темный период может снизить чувствительность личинок к свету и темноте. После исчезновения света личинки совершают повороты под большим углом к исчезнувшему источнику света, что объясняет навигационную реакцию личинок.[45] Острое воздействие этанола снижает зрительную чувствительность личинок, вызывая задержку реакции при изменении светового и темного периода.[44]
Смотрите также
- Водное передвижение
- Роль кожи в передвижении - Использование покровной системы при перемещении животных
- Компромиссы для передвижения в воздухе и воде - Сравнение плавания и полета, эволюции и биофизики
- Волнообразное движение
использованная литература
- ^ а б c d е ж г Бредер, CM (1926). «Передвижение рыб». Zoologica. 4: 159–297.
- ^ а б c d е ж г час я j k л м п Sfakiotakis, M .; Lane, D. M .; Дэвис, Дж. Б. С. (1999). «Обзор способов плавания рыб для водного передвижения» (PDF). Журнал IEEE по океанической инженерии. 24 (2): 237–252. Дои:10.1109/48.757275. Архивировано из оригинал (PDF) на 24.12.2013.
- ^ Лонг-младший, Дж. Х., Шеперд, У. и Рут, Р. Г. (1997). Маневренность и обратимая тяга: как рыба, напоминающая угря, плавает вперед и назад, используя бегущие волны тела ". В: Proc. Специальная сессия по биоинженерным исследованиям, связанным с автономными подводными аппаратами, 10-й межд. Symp. Беспилотная подводная технология без привязки (стр. 118-134).
- ^ Хокинс, JD; Сепульведа, Калифорния; Грэм, JB; Диксон, KA (2003). "Исследования в области плавания в восточной части Тихого океана бонито Sarda chiliensis, близкий родственник тунцов (семейство Scombridae) II. Кинематика ». Журнал экспериментальной биологии. 206 (16): 2749–2758. Дои:10.1242 / jeb.00496. PMID 12847120.
- ^ Климли, А. Питер (2013). Биология акул, скатов и скатов. Издательство Чикагского университета. ISBN 978-0-226-44249-5.
- ^ «Барракуда», Википедия, 2019-04-24, получено 2019-05-01
- ^ Линдси, К. (1978). «Передвижение». In Hoar W.S .; Рэндалл, Д.Дж. (ред.). Физиология рыб. 7. Академическая пресса. Сан-Франциско. С. 1–100.
- ^ Фултон, CJ; Johansen, JL; Стеффенсен, Дж. Ф. (2013). «Энергетические крайности в водных передвижениях коралловых рифовых рыб». PLOS ONE. 8 (1): e54033. Дои:10.1371 / journal.pone.0054033. ЧВК 3541231. PMID 23326566.
- ^ Беннетта, Уильям Дж. (1996). "Глубокое дыхание". Архивировано из оригинал на 2007-08-14. Получено 2007-08-28.
- ^ "Спят ли акулы". Flmnh.ufl.edu. 2017-05-02. Архивировано из оригинал 18 сентября 2010 г.
- ^ а б Блейк, Р. В. (2004). «Обзорная статья: Функциональный дизайн рыб и плавательные характеристики». Журнал биологии рыб. 65 (5): 1193–1222. Дои:10.1111 / j.0022-1112.2004.00568.x.
- ^ а б Weihs, Дэниел (2002). "Стабильность против Маневренность при водном передвижении ». Интегрированная и вычислительная биология. 42 (1): 127–134. Дои:10.1093 / icb / 42.1.127. PMID 21708701.
- ^ Фултон, CJ; Bellwood, DR; Уэйнрайт, ПК (2005). "Энергия волн и плавательные способности формируют скопления рыб коралловых рифов". Труды Королевского общества B. 272 (1565): 827–832. Дои:10.1098 / rspb.2004.3029. ЧВК 1599856. PMID 15888415.
- ^ Heatwole, SJ; Фултон, CJ (2013). «Поведенческая гибкость рыб коралловых рифов, реагирующих на быстро меняющуюся среду». Морская биология. 160 (3): 677–689. Дои:10.1007 / s00227-012-2123-2.
- ^ МакГенри, Мэтью Дж .; Лаудер, Джордж В. (2006). «Онтогенез формы и функция: Опорно-двигательная Морфология и Drag в данио рерио (Данио Рерио)". Журнал морфологии. 267 (9): 1099–1109. Дои:10.1002 / jmor.10462. PMID 16752407. S2CID 33343483.
- ^ "Актиноптеригии: Подробнее о морфологии". Калифорнийский университет. Получено 11 января 2017.
- ^ а б c d е ж Фиш Ф.Э. (1990) Конструкция крыла и масштабирование летучей рыбы с учетом летных характеристик. "Дж. Зоол. Лондон". 221, 391-403.
- ^ а б c Рыба, Фрэнк. (1991) На плавнике и молитве. "Ученые". 3 (1), 4-7.
- ^ «Архивная копия». Архивировано из оригинал на 2015-01-08. Получено 2015-01-08.CS1 maint: заархивированная копия как заголовок (ссылка на сайт)
- ^ «Лазающая рыба». Архивировано из оригинал на 2009-08-29. Получено 2015-02-26.
- ^ «Мэриленд терпит неудачу в войне с агрессивными ходячими рыбами», National Geographic News12 июля 2002 г.
- ^ Ракушки, деревья и днище: странные места обитания рыб
- ^ «Тропические рыбы могут месяцами жить без воды». Рейтер. 15 ноября 2007 г.
- ^ Рыба живет в бревнах, дыша воздухом, месяцами
- ^ Рыба живет в бревнах, дыша воздухом, месяцами
- ^ Джонс, AT; К.Дж. Сулак (1990). "Первая Центрально-Тихоокеанская плита и Гавайские рекорды о глубоководных рыбах-треногах Батиптероевый граллатор (Рыбы: Chlorophthalmidae) " (PDF). Тихоокеанская наука. 44 (3): 254–7.
- ^ Рыба ходит с плавниками и ходит
- ^ Поведенческие свидетельства эволюции ходьбы и прыжков до появления на суше у саркоптерийских рыб
- ^ Маленький шаг для двустворчатой рыбы, большой шаг в эволюции ходьбы
- ^ Монахи, Нил (2006). Солоноводные рыбы. TFH. С. 223–226. ISBN 978-0-7938-0564-8.
- ^ Аллен, Джерри (1999). Морские рыбы Юго-Восточной Азии: Полевое руководство для рыболовов и дайверов. Издательство Tuttle. п. 56. ISBN 978-1-4629-1707-5.
у многих из них костлявый острый хвост, и они одинаково хорошо зарываются вперед или назад.
- ^ а б c «Модели течения личинок рыб: волнообразное плавание в режиме промежуточного течения» Ульрике К. Мюллер, Йосу Г. М. ван ден Богаарта и Йохану Л. ван Леувену. Журнал экспериментальной биологии, 2008 211: 196-205; DOI: 10.1242 / jeb.005629
- ^ а б c «Критические скорости плавания личинок коралловых рифовых рыб на поздних стадиях: различия внутри видов, между видами и между местоположениями» Фишера, Р., Лейса, Дж. М., Кларка, Д. Л. в морской биологии (2005) 147: 1201. https://doi.org/10.1007/s00227-005-0001-x,
- ^ «Развитие плавательных способностей личинок рифовых рыб» Ребекка Фишер, Дэвид Р. Беллвуд, Суреш Д. Работа в серии «Морская экология-прогресс» - MAR ECOL-PROGR SER. 202. 163-173. 10,3354 / meps202163
- ^ «Максимальные устойчивые скорости плавания поздних личинок девяти видов рифовых рыб» Ребекки Фишер, Шона К. Уилсона в Журнале экспериментальной морской биологии и экологии, том 312, выпуск 1, 2004 г., страницы 171-186, ISSN 0022- 0981, г. https://doi.org/10.1016/j.jembe.2004.06.009
- ^ «Развитие плавательных способностей личинок рифовых рыб» Ребекка Фишер, Дэвид Р. Беллвуд, Суреш Д. Работа в серии «Морская экология-прогресс» - MAR ECOL-PROGR SER. 202. 163-173. 10,3354 / meps202163
- ^ «Как крутящий момент тела и число Рейнольдса (St) изменяются в зависимости от скорости плавания и стадии развития у личинок рыбок данио» Йохана Л. ван Левена, Сиз Дж. Воезенек и Ульрике К. Мюллер в J. R. Soc. Интерфейс 2015 12 20150479; DOI: 10.1098 / rsif.2015.0479. Опубликовано 12 августа 2015 г.
- ^ «Как крутящий момент тела и число Струхаля изменяются со скоростью плавания и стадией развития у личинок рыбок данио» Йохана Л. ван Левена, Сиз Дж. Военек и Ульрике К. Мюллер в J. R. Soc. Интерфейс 2015 12 20150479; DOI: 10.1098 / rsif.2015.0479. Опубликовано 12 августа 2015 г.
- ^ «Гидродинамическое голодание у личинок первоклассных рыб» Виктора Чайна, Труды Роя Хольцманина Национальной академии наук, июнь 2014 г., 111 (22) 8083-8088; DOI: 10.1073 / pnas.1323205111
- ^ а б c «Гидродинамический режим определяет успех кормления личинок рыб посредством модуляции кинематики удара» Виктора Чайна, Лираз Леви, Алекса Либерзона, Тала Эльмалиаха, Рой Хольцман в Proc. R. Soc. B 2017 284 20170235; DOI: 10.1098 / rspb.2017.0235. Опубликовано 26 апреля 2017 г.
- ^ «Количественная гидродинамическая модель всасывающего питания личинок рыб: роль сил трения» М. Р. Дрост, М. Мюллер, Дж. У. М. Оссе в Proc. R. Soc. Лондон. B 1988, 234 263-281; DOI: 10.1098 / rspb.1988.0048. Опубликовано 23 августа 1988 г.
- ^ а б «Личинки рыбок данио уклоняются от хищников, ощущая поток воды» Уильяма Дж. Стюарта, Жилберто С. Карденаса, Мэтью Дж. МакГенри в Журнале экспериментальной биологии, 2013, 216: 388-398; DOI: 10.1242 / jeb.072751
- ^ «Количественная оценка потока во время всасывающего кормления синежаберной солнечной рыбы» Ферри, Лара и Уэйнрайт, Питер и Лаудер, Джордж в зоологии (Йена, Германия). 106. 159-68. 10.1078 / 0944-2006-00110
- ^ а б «Передвижение личинок рыбок данио: влияние времени суток, освещения и этанола», автор R.C. Макфэйл, Дж. Брукс, Д.Л. Хантер, Б. Паднос, Т. Д. Айронс, С. Падилла в нейротоксикологии. 30. 52-8. 10.1016 / j.neuro.2008.09.011.
- ^ а б c «Модуляция двигательной активности у личинок рыбок данио во время световой адаптации» Гарольда А. Берджесса и Майкла Гранато. В журнале экспериментальной биологии 2007 210: 2526-2539; DOI: 10.1242 / jeb.003939
дальнейшее чтение
- Александр, Р. Макнил (2003) Принципы передвижения животных. Издательство Принстонского университета. ISBN 0-691-08678-8.
- Элой, Кристоф (2013). «О лучшей конструкции для волнообразного плавания». Журнал гидромеханики. 717: 48–89. Дои:10.1017 / jfm.2012.561.
- Лаудер Г.В.; Nauen, JC; Друкер, EG (2002). "Экспериментальная гидродинамика и эволюция: функция срединных плавников у лучеоперых рыб". Интегр. Комп. Биол. 42 (5): 1009–1017. Дои:10.1093 / icb / 42.5.1009. PMID 21680382.
- Виделер Дж. Дж. (1993) Рыба плавание Springer. ISBN 9780412408601.
- Фогель, Стивен (1994) Жизнь в движущейся жидкости: физическая биология потока. Издательство Принстонского университета. ISBN 0-691-02616-5 (особенно стр. 115–117 и стр. 207–216 для конкретных биологических примеров плавания и полета соответственно)
- Wu, Theodore, Y.-T., Brokaw, Charles J., Brennen, Christopher, Eds. (1975) Плавание и полеты на природе. Том 2, Plenum Press. ISBN 0-306-37089-1 (особенно стр. 615–652 для более глубокого изучения плавания рыб)
внешние ссылки
- Как плавают рыбы: исследование разгадывает загадку мышц
- Имитация передвижения рыбы
- Базовое введение в основные принципы создания биологически вдохновленных плавательных роботов
- Биомеханика плавания
| Около рыбы |  | ||||
|---|---|---|---|---|---|
| Анатомия и физиология | |||||
| Сенсорный системы | |||||
| Размножение | |||||
| Передвижение | |||||
| Другой поведение | |||||
| От место обитания | |||||
| Другие типы | |||||
| Коммерческий |
| ||||
| Основные группы | |||||
| Списки | |||||
| |||||
| Плавники |  | |
|---|---|---|
| Конечности | ||
| Крылья | ||
| Эволюция | ||
| Связанный | ||