Лидар - Lidar




Лидар (/ˈлаɪdɑːr/, также ЛИДАР, LiDAR, и ЛАДАР) - метод измерения расстояний (ранжирование ) путем освещения цели лазер света и измерения отражения с помощью датчика. Различия во времени возврата лазера и длине волны затем можно использовать для создания цифровых 3-D представления цели. Он имеет наземные, бортовые и мобильные приложения.
Период, термин лидар изначально был чемодан из свет и радар.[1][2]Теперь он также используется как аббревиатура от "обнаружение света и дальность"[3]и «лазерная визуализация, обнаружение и дальность».[4][5]Лидар иногда называют 3-D лазерное сканирование, особая комбинация 3-D сканирование и лазерное сканирование.
Лидар обычно используется для создания карт высокого разрешения с приложениями в геодезия, геодезия, геоматика, археология, география, геология, геоморфология, сейсмология, лесное хозяйство, физика атмосферы,[6] лазерное наведение, бортовое лазерное картографирование полосы обзора (ALSM), и лазерная альтиметрия. Эта технология также используется в управлении и навигации для некоторых автономные автомобили.[7][8]
История и этимология
Под руководством Малькольм Стич, то Hughes Aircraft Company представил первую лидароподобную систему в 1961 году,[9][10] вскоре после изобретения лазер. Эта система, предназначенная для слежения за спутниками, сочетает в себе формирование изображений с лазерной фокусировкой и возможность расчета расстояний путем измерения времени возврата сигнала с помощью соответствующих датчиков и электроники сбора данных. Первоначально он назывался «Колидар», что означает «Обнаружение и определение дальности когерентного света».[11] происходит от термина "радар », что само по себе является аббревиатурой от« Radio Detection And Ranging ». Начиная с ранних колидарных систем, все лазерные дальномеры, выведены лазерные высотомеры и лидары. Первым практическим наземным применением колидарной системы стал «Колидар Марк II», большой винтовочный лазерный дальномер, произведенный в 1963 году, который имел дальность действия 7 миль и точность 15 футов, предназначенный для использования в военных целях.[12][10]Первое упоминание о лидар как об отдельном слове в 1963 году предполагает, что он возник как сумочка с "свет и «радар»: «В конечном итоге лазер может стать чрезвычайно чувствительным детектором определенных длин волн от удаленных объектов. Между тем он используется для изучения Луны с помощью лидаров (световых радаров) ... »[2] В Оксфордский словарь английского языка поддерживает эту этимологию.[1]
Первые приложения лидара появились в метеорологии, где Национальный центр атмосферных исследований использовал это для измерения облака и загрязнение.[13] Широкая публика узнала о точности и полезности лидарных систем в 1971 году во время Аполлон 15 миссии, когда астронавты использовали лазерный высотомер для нанесения на карту поверхности Луны. Хотя английский язык больше не рассматривает «радар» как аббревиатуру, а в печатных текстах повсеместно используется слово без заглавной буквы, слово «лидар» стало заглавным как «ЛИДАР». или «LiDAR» в некоторых публикациях, начиная с 1980-х годов. В настоящее время не существует единого мнения по поводу использования заглавных букв, что отражает неуверенность в том, является ли «лидар» аббревиатурой, и если это акроним, следует ли использовать его в нижнем регистре, например «радар» и «сонар ". В различных публикациях лидар именуется" LIDAR "," LiDAR "," LIDaR "или" Lidar ". USGS использует и «лидар», и «лидар», иногда в одном документе;[14] то Газета "Нью-Йорк Таймс преимущественно использует лидар для статей, написанных сотрудниками,[15] хотя авторы новостных лент, такие как Reuters, могут использовать Lidar.[16]
Общее описание
Лидар использует ультрафиолетовый, видимый, или ближний инфракрасный свет к объектам изображения. Он может поражать широкий спектр материалов, включая неметаллические предметы, камни, дождь, химические соединения, аэрозоли, облака и даже одиночные молекулы.[6] Узкий лазерный луч может отображать физические особенности с очень высокой резолюции; например, самолет может отображать местность с разрешением 30 сантиметров (12 дюймов) или лучше.[17]


Основная концепция лидаров принадлежит EH Synge в 1930 году, который предусмотрел использование мощных прожекторов для исследования атмосферы.[18][19] Действительно, с тех пор лидар широко используется для атмосферных исследований и метеорология. Лидарные инструменты подходят для самолет и спутники осуществлять геодезия и картографирование - недавним примером является Лидар передовых исследований с воздуха в рамках геологической службы США.[20] НАСА определила лидар как ключевую технологию для обеспечения автономной высокоточной безопасной посадки будущих роботизированных и пилотируемых лунных аппаратов.[21]
Длины волн варьируются в зависимости от цели: примерно от 10 микрометры (инфракрасный ) примерно до 250 нм (УФ ). Обычно свет отражается через обратное рассеяние, в отличие от чистого отражения, которое можно найти в зеркале. Для разных приложений лидара используются разные типы рассеяния: чаще всего Рэлеевское рассеяние, Рассеяние Ми, Рамановское рассеяние, и флуоресценция.[6] Подходящие комбинации длин волн могут позволить дистанционное картографирование атмосферного содержимого путем определения зависимых от длины волны изменений интенсивности возвращаемого сигнала.[22]
дизайн
Эта секция нужны дополнительные цитаты для проверка. (Апрель 2017 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |
Два типа схем обнаружения лидара - это «некогерентное» или прямое обнаружение энергии (которое в основном измеряет изменения амплитуды отраженного света) и последовательный обнаружение (лучше всего для измерения Допплер сдвиги, или изменения фазы отраженного света). Связанные системы обычно используют оптическое гетеродинное обнаружение.[23] Это более чувствительно, чем прямое обнаружение, и позволяет им работать с гораздо меньшей мощностью, но требует более сложных приемопередатчиков.
Оба типа используют импульсные модели: либо микроимпульс или высокая энергия. Микроимпульсные системы используют прерывистые всплески энергии. Они возникли в результате постоянно растущей мощности компьютеров в сочетании с достижениями в области лазерных технологий. Они потребляют значительно меньше энергии в лазере, обычно порядка одного микроджоуль, и часто являются «безопасными для глаз», то есть их можно использовать без мер предосторожности. Системы большой мощности широко используются в исследованиях атмосферы, где они широко используются для измерения параметров атмосферы: высоты, слоистости и плотности облаков, свойств частиц облаков (коэффициент экстинкции, коэффициент обратного рассеяния, деполяризация ), температуры, давления, ветра, влажности и концентрации газовых примесей (озон, метан, закись азота и т. д.).[24]
Компоненты
Лидарные системы состоят из нескольких основных компонентов.
Лазер
600–1000 нм лазеры наиболее распространены для ненаучных приложений. Максимальная мощность лазера ограничена, или используется автоматическая система отключения, которая выключает лазер на определенной высоте, чтобы сделать его безопасным для глаз людей на земле.
Одна из распространенных альтернатив, лазеры с длиной волны 1550 нм, безопасны для глаз при относительно высоких уровнях мощности, поскольку эта длина волны не сильно поглощается глазом, но технология детекторов менее развита, и поэтому эти длины волн обычно используются на больших расстояниях с более низкой точностью. Они также используются в военных целях, потому что 1550 нм не видны в очки ночного видения, в отличие от более короткого инфракрасного лазера на 1000 нм.
Лидары для топографической съемки с воздуха обычно используют диодную накачку 1064 нм. YAG лазеры, а батиметрический (подводные исследования глубины) в системах обычно используются YAG-лазеры с удвоенной частотой 532 нм с диодной накачкой, поскольку 532 нм проникает в воду с гораздо меньшими затухание чем 1064 нм. Настройки лазера включают частоту следования лазера (которая контролирует скорость сбора данных). Длина импульса обычно является атрибутом длины лазерного резонатора, количества проходов, необходимых для усиления материала (YAG, YLF и т. д.), и Q-переключатель (пульсирующая) скорость. Лучшее разрешение цели достигается с помощью более коротких импульсов при условии, что приемные детекторы лидара и электроника имеют достаточную полосу пропускания.[24]
Фазированные решетки
А фазированная решетка может освещать любое направление, используя микроскопический массив отдельных антенн. Управление синхронизацией (фазой) каждой антенны направляет связный сигнал в определенном направлении.
Фазированные решетки используются в радарах с 1950-х годов. Эту же технику можно использовать и со светом. Порядка миллиона оптических антенн используются, чтобы увидеть диаграмму направленности определенного размера в определенном направлении. Система управляется синхронизацией точной вспышки. Одна микросхема (или несколько) заменяет электромеханическую систему стоимостью 75 000 долларов США, резко сокращая расходы.[25]
Несколько компаний работают над разработкой коммерческих твердотельных лидарных установок, в том числе компания Quanergy которая разрабатывает твердотельное устройство 905 нм, хотя, похоже, у них есть некоторые проблемы в разработке.[26]
Система управления может изменять форму линзы для включения функций увеличения / уменьшения. Конкретные подзоны могут быть выбраны с интервалом менее секунды.[25]
Электромеханический лидар работает от 1000 до 2000 часов. Напротив, твердотельный лидар может работать до 100 000 часов.[25]
Микроэлектромеханические машины
Микроэлектромеханические зеркала (MEMS) не являются полностью твердотельными. Однако их крошечный форм-фактор обеспечивает многие из тех же преимуществ по стоимости. Один лазер направлен на одно зеркало, которое можно переориентировать для просмотра любой части поля цели. Зеркало быстро вращается. Однако системы MEMS обычно работают в одной плоскости (слева направо). Для добавления второго измерения обычно требуется второе зеркало, которое перемещается вверх и вниз. В качестве альтернативы другой лазер может попасть в то же зеркало под другим углом. Системы MEMS могут выйти из строя из-за ударов / вибрации и могут потребовать повторной калибровки. Цель состоит в том, чтобы создать небольшой микрочип для улучшения инноваций и дальнейшего технического прогресса.[25]
Сканер и оптика
Скорость проявления изображений зависит от скорости их сканирования. Варианты сканирования азимут и возвышение включают двойные колеблющиеся плоские зеркала, комбинацию с многоугольным зеркалом и двухосевой сканер. Выбор оптики влияет на угловое разрешение и дальность обнаружения. Дырчатое зеркало или Разделитель луча варианты сбора обратного сигнала.
Фотоприемная и приемная электроника
Два основных фотоприемник В лидаре используются технологии: твердое состояние фотоприемники, например кремниевые лавинные фотодиоды, или фотоумножители. Чувствительность приемника - еще один параметр, который необходимо сбалансировать в конструкции лидара.
Датчики лидара, установленные на мобильных платформах, таких как самолеты или спутники, требуют приборов для определения абсолютного положения и ориентации датчика. Такие устройства обычно включают спутниковая система навигации приемник и инерциальная единица измерения (ИДУ).
Датчик

Лидар использует активные датчики, которые обеспечивают собственный источник освещения. Источник энергии ударяет по объектам, и отраженная энергия обнаруживается и измеряется датчиками. Расстояние до объекта определяется путем регистрации времени между переданными и отраженными импульсами и использованием скорости света для расчета пройденного расстояния.[27] Flash LIDAR позволяет создавать трехмерные изображения из-за способности камеры излучать более крупную вспышку и определять пространственные отношения и размеры интересующей области с помощью возвращенной энергии. Это позволяет получить более точное изображение, поскольку захваченные кадры не нужно сшивать вместе, а система нечувствительна к движению платформы, что приводит к меньшим искажениям.[28]
Трехмерное изображение может быть достигнуто с использованием как сканирующих, так и не сканирующих систем. «Лазерный радар с трехмерным стробированием» - это несканирующая лазерная локационная система, в которой применяется импульсный лазер и камера с быстрым стробированием. Начались исследования виртуального управления лучом с использованием Цифровая обработка света (DLP) технология.
Лидар визуализации также может быть выполнен с использованием массивов высокоскоростных детекторов и массивов чувствительных к модуляции детекторов, обычно построенных на отдельных микросхемах с использованием комплементарный металл – оксид – полупроводник (CMOS) и гибридный CMOS /Устройство с зарядовой связью (ПЗС) методы изготовления. В этих устройствах каждый пиксель выполняет некоторую локальную обработку, такую как демодуляция или стробирование на высокой скорости, преобразовывая сигналы с понижением частоты до скорости видео, так что массив можно читать как камеру. Используя этот метод, можно одновременно получить много тысяч пикселей / каналов.[29] Использование 3D-лидарных камер высокого разрешения гомодинное обнаружение с электронной ПЗС или КМОП ставня.[30]
Лидар когерентного изображения использует обнаружение гетеродина на синтетической матрице для того, чтобы активный одноэлементный приемник работал так, как если бы он был массивом изображений.[31]
В 2014, Лаборатория Линкольна анонсировала новый чип обработки изображений с более чем 16 384 пикселями, каждый из которых может отображать одиночный фотон, что позволяет им захватывать большую площадь на одном изображении. Более раннее поколение технологии с четвертью пикселей от этого числа было отправлено военными США после землетрясения на Гаити в январе 2010 года; за один проход бизнес-джета на высоте 3000 метров (10000 футов) над Порт-о-Пренсом можно было мгновенно сделать снимки 600-метровых площадей города с разрешением 30 сантиметров (12 дюймов), отображая точную высоту заваленных обломками городских улиц.[32] Система Lincoln в 10 раз быстрее. Чип использует арсенид галлия индия (InGaAs), который работает в инфракрасном спектре на относительно длинной длине волны, что позволяет использовать более высокую мощность и большие диапазоны. Во многих приложениях, таких как беспилотные автомобили, новая система снизит затраты, поскольку не требует наличия механического компонента для наведения чипа. InGaAs использует менее опасные длины волн, чем обычные кремниевые детекторы, которые работают на видимых длинах волн.[33]
Типы
На основе метода освещения
Flash LiDAR
В лидаре со вспышкой все поле зрения освещено широким расходящийся лазерный луч за один импульс. В этом отличие от обычного сканирующего лидара, в котором используется коллимированный лазерный луч который освещает одну точку за раз, а луч растровый сканированный для точечного освещения поля зрения. Этот метод освещения также требует другой схемы обнаружения. И в сканирующем, и в флеш-лидаре времяпролетная камера используется для сбора информации как о трехмерном местоположении, так и об интенсивности падающего на него света в каждом кадре. Однако в сканирующем лидаре эта камера содержит только точечный датчик, тогда как в лидаре со вспышкой камера содержит либо одномерный, либо двумерный датчик. матрица датчиков, каждый пиксель которого собирает трехмерную информацию о местоположении и интенсивности. В обоих случаях информация о глубине собирается с помощью время полета лазерного импульса (т. е. времени, которое требуется каждому лазерному импульсу, чтобы поразить цель и вернуться к датчику), что требует синхронизации импульсов лазера и захвата камерой.[34] В результате получается камера, которая снимает не цвета, а расстояние.[25] Вспышка LiDAR особенно выгодна по сравнению со сканированием LiDAR, когда камера, сцена или и то, и другое движутся, поскольку вся сцена освещается одновременно. При сканировании LiDAR движение может вызывать "дрожание" во времени, когда лазер проецируется на сцену.
Как и во всех лидарах, встроенный источник освещения делает лидар вспышкой активным датчиком.[35] Возвращаемый сигнал обрабатывается встроенными алгоритмами для создания практически мгновенного трехмерного рендеринга объектов и особенностей местности в поле зрения датчика.[36] Частота следования лазерных импульсов достаточна для создания трехмерных видеороликов с высоким разрешением и точностью.[34][37] Высокая частота кадров датчика делает его полезным инструментом для множества приложений, которые извлекают выгоду из визуализации в реальном времени, таких как высокоточные операции удаленной посадки.[38] Путем немедленного возврата трехмерной сетки высот целевых ландшафтов датчик вспышки можно использовать для определения оптимальных зон посадки в сценариях автономной посадки космического корабля.[39]
Чтобы видеть на расстоянии, нужна мощная вспышка света. Мощность ограничена уровнями, которые не повреждают сетчатку человека. Длины волн не должны влиять на глаза человека. Однако недорогие кремниевые формирователи изображения не воспринимают свет в безопасном для глаз спектре. Вместо, арсенид галлия требуются тепловизоры, что может увеличить расходы до 200 000 долларов.[25] Арсенид галлия - это то же соединение, которое используется для производства дорогих и высокоэффективных солнечных панелей, обычно используемых в космических приложениях.
На основании ориентации
Лидар может быть ориентирован на надир, зенит Например, лидарные высотомеры смотрят вниз, атмосферные лидары - вверх, а лидарные - системы предотвращения столкновений смотрят сбоку.
На основе платформы
Лидарные приложения можно разделить на бортовые и наземные.[40] Для этих двух типов требуются сканеры с различными характеристиками в зависимости от назначения данных, размера области, которую необходимо захватить, желаемого диапазона измерения, стоимости оборудования и т. Д. Также возможны космические платформы, см. спутниковая лазерная альтиметрия.
В воздухе
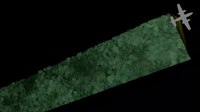
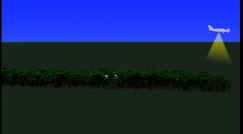
Бортовой лидар (также воздушное лазерное сканирование) - это когда лазерный сканер, прикрепленный к летательному аппарату во время полета, создает 3-D облако точек модель пейзажа. На данный момент это наиболее подробный и точный метод создания цифровые модели рельефа, заменяя фотограмметрия. Одним из основных преимуществ по сравнению с фотограмметрией является возможность отфильтровывать отражения от растительности из модели облака точек для создания цифровая модель местности который представляет собой поверхности земли, такие как реки, тропы, объекты культурного наследия и т. д., которые скрыты деревьями. В категории бортовых лидаров иногда проводится различие между высотными и низковысотными приложениями, но основное различие заключается в снижении как точности, так и плотности точек данных, полученных на больших высотах. Воздушный лидар также может использоваться для создания батиметрических моделей на мелководье.[41]
Основные компоненты бортового лидара: цифровые модели рельефа (DEM) и цифровые модели поверхности (DSM). Точки и наземные точки являются векторами дискретных точек, в то время как матрицы высот и DSM представляют собой интерполированные растровые сетки дискретных точек. Процесс также включает в себя получение цифровых аэрофотоснимков. Для интерпретации глубинных оползней, например, под покровом растительности, уступов, трещин растяжения или опрокидывающихся деревьев используется лидар с воздушным потоком. С помощью цифровых лазерных моделей рельефа можно видеть сквозь лесной покров, выполнять подробные измерения уступов, эрозии и наклона электрических столбов.[42]
Лидарные данные, полученные с воздуха, обрабатываются с помощью набора инструментов под названием Toolbox for Lidar Data Filtering and Forest Studies (TIFFS).[43] для лидарной фильтрации данных и программного обеспечения для изучения местности. Данные интерполируются в цифровые модели местности с помощью программного обеспечения. Лазер направлен на область, которая должна быть нанесена на карту, и высота каждой точки над землей вычисляется путем вычитания исходной координаты z из соответствующей отметки цифровой модели местности. На основе этой высоты над землей получают данные, не относящиеся к растительности, которые могут включать такие объекты, как здания, линии электропередач, летающие птицы, насекомые и т. Д. Остальные точки рассматриваются как растительность и используются для моделирования и картирования. На каждом из этих графиков лидарные показатели рассчитываются путем вычисления таких статистических данных, как среднее значение, стандартное отклонение, асимметрия, процентили, среднее квадратичное и т. Д.[43]
Лидарная батиметрия с воздуха
Лидар в воздухе батиметрический технологическая система предполагает измерение время полета сигнала от источника до его возврата на датчик. Методика сбора данных включает компонент картирования морского дна и компонент наземной достоверности, который включает в себя трансекты видео и отбор проб. Он работает с использованием лазерного луча зеленого спектра (532 нм).[44] Два луча проецируются на быстро вращающееся зеркало, которое создает массив точек. Один из лучей проникает в воду, а также обнаруживает нижнюю поверхность воды при благоприятных условиях.
Полученные данные показывают всю площадь поверхности суши, выступающей над морским дном. Этот метод чрезвычайно полезен, поскольку он будет играть важную роль в основной программе картирования морского дна. Картирование дает топографию суши, а также подводные возвышенности. Отражательная визуализация морского дна - еще одно решение этой системы, которое может помочь при картировании подводных местообитаний. Этот метод использовался для построения трехмерных изображений вод Калифорнии с помощью гидрографического лидара.[45]

Дроны в настоящее время используются с лазерными сканерами, а также с другими удаленными датчиками как более экономичный метод сканирования небольших участков.[46] Возможность дистанционного зондирования с помощью дронов также исключает любую опасность, которой могут подвергнуться экипажи пилотируемых самолетов в труднопроходимой местности или отдаленных районах.
Наземный
Наземные применения лидаров (также наземное лазерное сканирование) происходят на поверхности Земли и могут быть как стационарными, так и мобильными. Стационарное наземное сканирование является наиболее распространенным методом съемки, например, при традиционной топографии, мониторинге, документации культурного наследия и судебной экспертизе.[40] В 3-D облака точек полученные с помощью этих типов сканеров, могут быть сопоставлены с цифровыми изображениями, снятыми из области сканирования с места расположения сканера, для создания реалистичных трехмерных моделей за относительно короткое время по сравнению с другими технологиями. Каждой точке в облаке точек присваивается цвет пикселя из полученного изображения, расположенного под тем же углом, что и лазерный луч, создавший точку.
Мобильный лидар (также мобильное лазерное сканирование) - это когда два или более сканера прикреплены к движущемуся транспортному средству для сбора данных по пути. Эти сканеры почти всегда работают в паре с другим оборудованием, включая GNSS приемники и Я должен. Одним из примеров применения является съемка улиц, где необходимо учитывать линии электропередач, точную высоту мостов, прилегающие деревья и т.д. Вместо того, чтобы собирать каждое из этих измерений отдельно в полевых условиях с тахометр, можно создать трехмерную модель из облака точек, в которой могут быть выполнены все необходимые измерения, в зависимости от качества собранных данных. Это устраняет проблему забывания о проведении измерения, если модель доступна, надежна и имеет соответствующий уровень точности.
Наземное лидарное картирование включает в себя процесс создания карты сетки занятости. Процесс включает в себя массив ячеек, разделенных на сетки, которые используют процесс для хранения значений высоты, когда данные лидара попадают в соответствующую ячейку сетки. Затем создается двоичная карта путем применения определенного порога к значениям ячеек для дальнейшей обработки. Следующим шагом является обработка радиального расстояния и z-координат от каждого сканирования, чтобы определить, какие трехмерные точки соответствуют каждой из заданных ячеек сетки, ведущих к процессу формирования данных.[47]
Приложения

Помимо приложений, перечисленных ниже, существует множество приложений для лидаров, которые часто упоминаются в Национальный лидарный набор данных программы.
сельское хозяйство

Сельскохозяйственные роботы были использованы для различных целей, начиная от разбрасывания семян и удобрений, методов зондирования, а также для разведки сельскохозяйственных культур с целью борьбы с сорняками.
Лидар может помочь определить, где вносить дорогостоящие удобрения. С его помощью можно создать топографическую карту полей и выявить склоны и солнечное освещение сельскохозяйственных угодий. Исследователи из Служба сельскохозяйственных исследований использовали эти топографические данные с результатами урожайности сельскохозяйственных угодий за предыдущие годы, чтобы разделить земли на зоны с высокой, средней и низкой урожайностью.[48] Это указывает на то, куда вносить удобрения, чтобы увеличить урожай.
Лидар теперь используется для наблюдения за насекомыми в полевых условиях. Использование лидара позволяет обнаруживать движение и поведение отдельных летающих насекомых с идентификацией до пола и вида.[49] В 2017 году была опубликована патентная заявка на эту технологию в Соединенных Штатах Америки, Европе и Китае.[50]
Еще одно приложение - картографирование урожая в садах и виноградниках для обнаружения роста листвы и необходимости обрезки или другого ухода, обнаружения изменений в урожайности фруктов или подсчета растений.
Лидар полезен в GNSS -отрицательные ситуации, такие как ореховые и фруктовые сады, где листва блокирует спутниковые сигналы для точное земледелие оборудование или трактор без водителя. Лидарные датчики могут обнаруживать края рядов, так что сельскохозяйственное оборудование может продолжать движение, пока сигнал GNSS не восстановится.
Классификация видов растений
Борьба с сорняками требует определения видов растений. Это можно сделать с помощью трехмерного лидара и машинного обучения.[51] Лидар создает контуры растений в виде «облака точек» со значениями дальности и отражения. Эти данные преобразуются, и из них извлекаются функции. Если вид известен, признаки добавляются как новые данные. Виды помечаются, и их характеристики изначально сохраняются в качестве примера для идентификации вида в реальной среде.Этот метод эффективен, потому что он использует лидар с низким разрешением и контролируемое обучение. Он включает простой в вычислении набор функций с общими статистическими характеристиками, которые не зависят от размера предприятия.[51]
Археология
Лидар находит множество применений в археологии, включая планирование полевых кампаний, картографирование объектов под пологом леса и обзор обширных непрерывных объектов, неотличимых от земли.[52] Lidar позволяет быстро и дешево создавать наборы данных с высоким разрешением. Продукты на основе лидаров можно легко интегрировать в географическую информационную систему (ГИС) для анализа и интерпретации.
Лидар также может помочь в создании цифровых моделей рельефа (ЦМР) с высоким разрешением археологических памятников, которые могут выявить микротопографию, которая в противном случае скрыта растительностью. Интенсивность возвращенного лидарного сигнала может использоваться для обнаружения объектов, скрытых под плоскими покрытыми растительностью поверхностями, такими как поля, особенно при картировании с использованием инфракрасного спектра. Наличие этих характеристик влияет на рост растений и, следовательно, на количество отраженного инфракрасного света.[53] Например, в Форт Босежур - Национальный исторический памятник Форт Камберленд, Канада, лидар обнаружил археологические объекты, связанные с осадой форта в 1755 году. Объекты, которые нельзя было различить на земле или с помощью аэрофотосъемки, были идентифицированы по наложенным теням холмов на ЦМР, созданной с помощью искусственного освещения от различные углы. Другой пример - работа в Караколь от Арлен Чейз и его жена Дайан Зайно Чейз.[54] В 2012 году лидар использовался для поиска легендарного города Ла-Сьюдад-Бланка или «Город бога обезьян» в La Mosquitia регион гондурасских джунглей. Во время семидневного картирования были обнаружены свидетельства искусственных построек.[55][56] В июне 2013 года открытие города Махендрапарвата было объявлено.[57] В южной части Новой Англии лидар использовался для выявления каменных стен, фундаментов зданий, заброшенных дорог и других элементов ландшафта, скрытых при аэрофотосъемке густым лесным пологом региона.[58][59][60] В Камбодже лидарные данные использовались Демианом Эвансом и Роландом Флетчером для выявления антропогенных изменений ландшафта Ангкора. [61]
В 2012 году лидар показал, что Purépecha урегулирование Ангамуко в Мичоакан В Мексике было примерно столько же зданий, сколько в сегодняшнем Манхэттене;[62] в то время как в 2016 году его использование для картирования древних дорог майя на севере Гватемалы выявило 17 эстакад, соединяющих древний город Эль Мирадор на другие сайты.[63][64] В 2018 году археологи с помощью лидаров обнаружили более 60000 рукотворных построек в Биосферный заповедник майя, "крупный прорыв", который показал Цивилизация майя был намного больше, чем считалось ранее.[65][66][67][68][69][70][71][72][73][74][75]
Автономные автомобили


Автономные автомобили может использовать лидар для обнаружения и обхода препятствий, чтобы безопасно перемещаться по окружающей среде.[7][76] Выходные данные облака точек от лидарного датчика предоставляют необходимые данные для программного обеспечения робота, чтобы определить, где существуют потенциальные препятствия в окружающей среде и где робот находится по отношению к этим потенциальным препятствиям. Сингапур Альянс Сингапур-Массачусетский технологический институт по исследованиям и технологиям (SMART) активно развивает технологии для автономных лидарных аппаратов.[77] Примеры компаний, производящих лидарные датчики, обычно используемые в автоматизации транспортных средств: Ouster[78] и Велодин.[79] Примерами продуктов для обнаружения и предотвращения препятствий, в которых используются лидарные датчики, являются трехмерная лазерная система прогноза Autonomous Solution, Inc.[80] и Велодин HDL-64E.[81] Имитационные модели лидара также представлены в симуляторах автономных автомобилей.[82]
В самые первые поколения автомобильной Адаптивный круиз-контроль в системах использовались только лидарные датчики.
Обнаружение объектов для транспортных систем
В транспортных системах для обеспечения безопасности транспортных средств и пассажиров и для разработки электронных систем, обеспечивающих помощь водителю, понимание транспортного средства и окружающей его среды имеет важное значение. Лидарные системы играют важную роль в безопасности транспортных систем. Многие электронные системы, которые добавляют к помощи водителю и безопасности транспортного средства, такие как адаптивный круиз-контроль (ACC), система экстренного торможения и Антиблокировочная система (ABS) зависят от обнаружения окружающей среды транспортного средства, чтобы действовать автономно или полуавтономно. Лидарное картирование и оценка достигают этого.
Краткий обзор: в современных лидарных системах используются вращающиеся шестиугольные зеркала, которые разделяют лазерный луч. Три верхних луча используются для обозначения транспортного средства и препятствий впереди, а нижние лучи используются для обнаружения разметки полос и дорожных элементов.[83] Основное преимущество использования лидара состоит в том, что получается пространственная структура, и эти данные могут быть объединены с другими датчиками, такими как радар и т. д., чтобы получить лучшее представление об окружающей среде транспортного средства с точки зрения статических и динамических свойств объектов, присутствующих в окружающей среде. И наоборот, серьезной проблемой с лидаром является сложность восстановления данных облака точек в плохих погодных условиях. Например, во время сильного дождя световые импульсы, излучаемые лидарной системой, частично отражаются от капель дождя, что добавляет к данным шум, называемый «эхом».[84]
Ниже упомянуты различные подходы к обработке данных лидара и их использованию вместе с данными от других датчиков посредством объединения датчиков для определения условий окружающей среды транспортного средства.
Обработка на основе GRID с использованием трехмерного лидара и слияния с радиолокационными измерениями
В этом методе, предложенном Филиппом Линднером и Гердом Ваниликом, данные лазера обрабатываются с использованием многомерной сетки занятости.[85] Данные от четырехслойного лазера предварительно обрабатываются на уровне сигнала, а затем обрабатываются на более высоком уровне, чтобы выделить особенности препятствий. Используется комбинированная двух- и трехмерная сеточная структура, и пространство в этих структурах ограничено. мозаичный на несколько дискретных ячеек. Этот метод позволяет эффективно обрабатывать огромное количество необработанных данных измерений, собирая их в пространственные контейнеры, ячейки сетки доказательств. Каждая ячейка связана с вероятностной мерой, которая определяет занятость ячейки. Эта вероятность рассчитывается с использованием измерения дальности лидарного датчика, полученного с течением времени, и нового измерения дальности, которые связаны с использованием Теорема Байеса. Двумерная сетка может наблюдать препятствие перед собой, но не может наблюдать пространство за препятствием. Для решения этой проблемы неизвестному состоянию за препятствием присваивается вероятность 0,5. Путем введения третьего измерения или, другими словами, использования многослойного лазера, пространственная конфигурация объекта может быть отображена в структуре сетки с определенной степенью сложности. Это достигается путем переноса точек измерения в трехмерную сетку. Занятые ячейки сетки будут иметь вероятность больше 0,5, и отображение будет закодировано цветом на основе вероятности. Ячейки, которые не заняты, будут иметь вероятность менее 0,5, и эта область обычно будет пустым пространством. Затем это измерение преобразуется в систему координат сетки с использованием положения датчика на транспортном средстве и положения транспортного средства в мировой системе координат. Координаты датчика зависят от его местоположения на транспортном средстве, и координаты транспортного средства вычисляются с использованием эгоизм оценка, которая оценивает движение транспортного средства относительно жесткой сцены. Для этого метода необходимо определить профиль сетки. Ячейки сетки, затронутые прошедшим лазерным лучом, рассчитываются путем применения Линейный алгоритм Брезенхема. Для получения пространственно протяженной структуры проводится компонентный анализ этих ячеек. Затем эта информация передается вращающийся суппорт алгоритм получения пространственных характеристик объекта. В дополнение к обнаружению лидара, данные РАДАРА, полученные с помощью двух радаров ближнего действия, объединяются для получения дополнительных динамических свойств объекта, таких как его скорость. Измерения назначаются объекту с помощью функции потенциального расстояния.
- Преимущества и недостатки
Геометрические характеристики объектов эффективно извлекаются из измерений, полученных с помощью трехмерной сетки занятости, с использованием алгоритма вращающегося штангенциркуля. Объединение данных радара с лидарными измерениями дает информацию о динамических свойствах препятствия, таких как скорость и местоположение препятствия для определения местоположения датчика, что помогает транспортному средству или водителю решить, какое действие необходимо выполнить для обеспечения безопасности. Единственная проблема - вычислительные требования для реализации этого метода обработки данных. Его можно реализовать в режиме реального времени, и он доказал свою эффективность, если размер трехмерной сетки занятости значительно ограничен. Но это можно улучшить до еще более широкого диапазона, используя специальные структуры пространственных данных, которые более эффективно манипулируют пространственными данными для представления трехмерной сетки.
Слияние трехмерного лидара и цветной камеры для обнаружения и отслеживания нескольких объектов
Основа, предложенная в этом методе Soonmin Hwang et al.,[86] делится на четыре этапа. Сначала в систему вводятся данные с камеры и трехмерного лидара. Оба входных сигнала от лидара и камеры получаются параллельно, а цветное изображение с камеры калибруется с помощью лидара. Для повышения эффективности в качестве предварительной обработки применяется горизонтальная трехмерная точечная выборка. Во-вторых, на этапе сегментации все трехмерные точки делятся на несколько групп по расстоянию от датчика, и последовательно оцениваются локальные плоскости от ближней плоскости до дальней плоскости. Местные плоскости оцениваются с помощью статистического анализа. Группа точек ближе к датчику используется для расчета начальной плоскости. Используя текущую локальную плоскость, следующая локальная плоскость оценивается посредством итеративного обновления. Предложения объектов на двумерном изображении используются для отделения объектов переднего плана от фона. Для более быстрого и точного обнаружения и отслеживания используются бинаризованные нормированные градиенты для оценки объектности со скоростью 300 кадров в секунду.[87] BING - это комбинация нормированного градиента и его бинаризованной версии, которая ускоряет процесс извлечения признаков и тестирования для оценки объектности окна изображения. Таким образом разделяются объекты переднего и заднего плана. Чтобы сформировать объекты после оценки объектности изображения с помощью BING, трехмерные точки группируются или группируются. Кластеризация выполняется с использованием DBSCAN (Пространственная кластеризация приложений с шумом на основе плотности), который может быть устойчивым из-за его менее параметрических характеристик. Используя сгруппированные трехмерные точки, то есть трехмерный сегмент, более точные области интересов (RoI) генерируются путем проецирования трехмерных точек на двухмерное изображение. Третий шаг - это обнаружение, которое в общих чертах делится на две части. Во-первых, это обнаружение объекта на двухмерном изображении, которое достигается с помощью Fast R-CNN.[88] поскольку этот метод не требует обучения, а также учитывает изображение и несколько областей интереса. Во-вторых, это обнаружение объекта в трехмерном пространстве, которое осуществляется методом вращения изображения.[89] Этот метод извлекает локальные и глобальные гистограммы для представления определенного объекта. Для объединения результатов обнаружения двухмерного изображения и трехмерного космического объекта рассматривается одна и та же трехмерная область, и к рассматриваемой области применяются два независимых классификатора из двухмерного изображения и трехмерного пространства. Калибровка результатов[90] выполняется для получения единой оценки достоверности от обоих детекторов. Эта единственная оценка получается в форме вероятности. Последний шаг - отслеживание. Это делается путем связывания движущихся объектов в настоящем и прошлом кадре. Для отслеживания объекта принято совпадение сегментов. Вычисляются такие характеристики, как среднее значение, стандартное отклонение, квантованные цветовые гистограммы, размер объема и количество трехмерных точек сегмента. Евклидово расстояние используется для измерения различий между сегментами. Чтобы судить о появлении и исчезновении объекта, берутся похожие сегменты (полученные на основе евклидова расстояния) из двух разных кадров и вычисляются оценки физического расстояния и несходства. Если оценки выходят за пределы диапазона для каждого сегмента в предыдущем кадре, отслеживаемый объект считается исчезнувшим.
- Преимущества и недостатки
Преимущества этого метода заключаются в использовании двухмерного изображения и трехмерных данных вместе, F l-score (который дает меру точности теста), средняя точность (AP) выше, чем при использовании только трехмерных данных с лидара. используемый. Эти баллы являются обычными измерениями, по которым оценивается структура. Недостатком этого метода является использование BING для оценки предложения объекта, поскольку BING прогнозирует небольшой набор ограничивающих рамок объекта.
Обнаружение препятствий и распознавание дорожной среды с помощью лидара
Этот метод, предложенный Kun Zhou et al.[91] не только фокусируется на обнаружении и отслеживании объектов, но также распознает разметку полос и особенности дороги. Как упоминалось ранее, в лидарных системах используются вращающиеся шестиугольные зеркала, которые разделяют лазерный луч на шесть лучей. Три верхних слоя используются для обнаружения движущихся вперед объектов, таких как автомобили и придорожные объекты. Датчик изготовлен из атмосферостойкого материала. Данные, обнаруженные лидаром, группируются в несколько сегментов и отслеживаются Фильтр Калмана. Кластеризация данных здесь выполняется на основе характеристик каждого сегмента на основе модели объекта, которая позволяет различать различные объекты, такие как автомобили, вывески и т. Д. Эти характеристики включают размеры объекта и т. Д. Отражатели на задних краях транспортных средств используются для отличать автомобили от других объектов. Слежение за объектами осуществляется с использованием двухступенчатого фильтра Калмана с учетом стабильности слежения и ускоренного движения объектов.[83] Данные об интенсивности отражения лидара также используются для обнаружения обочины за счет использования надежной регрессии для устранения окклюзий. Дорожная разметка обнаруживается с помощью модифицированного метода Оцу путем различения шероховатых и блестящих поверхностей.[92]
- Преимущества
Придорожные отражатели, обозначающие границу полосы движения, иногда по разным причинам скрываются. Следовательно, для распознавания дорожной границы необходима другая информация. Лидар, используемый в этом методе, может измерять отражательную способность от объекта. Следовательно, с помощью этих данных можно также распознать границу дороги. Кроме того, использование датчика с устойчивой к погодным условиям головкой помогает обнаруживать объекты даже в плохих погодных условиях. Модель высоты навеса до и после наводнения является хорошим примером. Лидар может обнаруживать подробные данные о высоте купола, а также его границы дороги.
Лидарные измерения помогают определить пространственную структуру препятствия. Это помогает различать объекты по размеру и оценивать влияние наезда на них.[85]
Лидарные системы обеспечивают лучший диапазон и большое поле обзора, что помогает обнаруживать препятствия на поворотах. Это одно из главных преимуществ перед радиолокационными системами, которые имеют более узкое поле зрения. Сочетание лидарных измерений с различными датчиками делает систему надежной и полезной в приложениях реального времени, поскольку лидарные системы не могут оценить динамическую информацию об обнаруженном объекте.[85]
Было показано, что лидаром можно манипулировать, заставляя беспилотные автомобили маневрировать и уклоняться.[93]
Биология и сохранение

Лидар также нашел множество применений в лесное хозяйство. Навес высоты, биомасса Измерения и площадь листьев могут быть изучены с помощью бортовых лидарных систем. Точно так же лидар также используется во многих отраслях промышленности, включая энергетику и железную дорогу, а также министерство транспорта как более быстрый способ съемки. Топографические карты также могут быть легко созданы с помощью лидара, в том числе для использования в развлекательных целях, например, при производстве спортивное ориентирование карты.[94] Лидар также применялся для оценки и оценки биоразнообразия растений, грибов и животных.[95][96][97][98]
В дополнение Спасите Лигу Редвудов предпринял проект по нанесению на карту высоких секвойи на побережье Северной Калифорнии. Лидар позволяет ученым не только измерять высоту ранее не нанесенных на карту деревьев, но и определять биоразнообразие леса секвойи. Стивен Силлетт, который работает с Лигой над лидарным проектом Северного побережья, утверждает, что эта технология будет полезна в будущих усилиях по сохранению и защите древних красных деревьев.[99][требуется полная цитата ]
Геология и почвоведение
Высокое разрешение цифровые карты высот генерируемые бортовым и стационарным лидаром, привели к значительному прогрессу в геоморфология (раздел геонаук, изучающий происхождение и эволюцию топографии земной поверхности). Способность лидара обнаруживать тонкие топографические особенности, такие как речные террасы и берега речных каналов, измерять высоту поверхности земли под растительным покровом, лучше определять пространственные производные высоты и обнаруживать изменения высоты между повторными съемками, позволили провести множество новых исследований. физических и химических процессов, формирующих ландшафты.[100]В 2005 г. Tour Ronde в Массив Монблан стал первым высоким альпийская гора на котором лидар использовался для наблюдения за учащающимися обвалами крупных скальных пород, предположительно вызванными изменением климата и деградацией вечной мерзлоты на большой высоте.[101]
Лидар также используется в структурной геологии и геофизике как комбинация бортового лидара и GNSS для обнаружения и изучения недостатки, для измерения поднять.[102] На выходе этих двух технологий можно создавать чрезвычайно точные модели рельефа местности - модели, которые могут даже измерять высоту земли через деревья. Эта комбинация использовалась наиболее широко для определения местоположения Сиэтл разлом в Вашингтон, Соединенные Штаты.[103] Эта комбинация также измеряет подъем на уровне Mount St. Helens с использованием данных до и после подъема 2004 года.[104] Монитор бортовых лидарных систем ледники и иметь способность обнаруживать незначительные увеличения или уменьшения. Спутниковая система, НАСА ICESat, включает в себя лидарную подсистему для этой цели. Авиационный топографический картограф НАСА[105] также широко используется для мониторинга ледники и выполнить анализ изменений прибрежной зоны. Комбинация также используется почвоведами при создании исследование почвы. Детальное моделирование местности позволяет почвоведам видеть изменения склонов и изломы рельефа, которые указывают на закономерности в пространственных отношениях почвы.
Атмосфера
Первоначально на основе рубиновых лазеров лидары для метеорологии были созданы вскоре после изобретения лазера и представляют собой одно из первых применений лазерной технологии. С тех пор возможности лидарной технологии значительно расширились, и лидарные системы используются для выполнения ряда измерений, включая профилирование облаков, измерение ветра, изучение аэрозолей и количественное определение различных атмосферных компонентов. Компоненты атмосферы, в свою очередь, могут предоставить полезную информацию, включая приземное давление (путем измерения поглощения кислорода или азота), выбросы парниковых газов (диоксид углерода и метан), фотосинтез (диоксид углерода), пожары (моноксид углерода) и влажность (водяной пар). . Атмосферные лидары может быть наземным, бортовым или спутниковым, в зависимости от типа измерения.
Дистанционное зондирование атмосферы с помощью лидара работает двумя способами:
- измеряя обратное рассеяние от атмосферы, и
- путем измерения рассеянного отражения от земли (когда лидар находится в воздухе) или другой твердой поверхности.
Обратное рассеяние из атмосферы дает прямую оценку облаков и аэрозолей. Другие производные измерения на основе обратного рассеяния, такие как ветер или кристаллы перистого льда, требуют тщательного выбора длины волны и / или поляризации. Доплеровский лидар и Лидар Рэлея Доплера используются для измерения температуры и / или скорости ветра вдоль луча путем измерения частоты обратно рассеянного света. В Доплеровское уширение газов в движении позволяет определять свойства по результирующему сдвигу частоты.[106] Сканирующие лидары, такие как NASA HARLIE LIDAR с коническим сканированием, использовались для измерения скорости атмосферного ветра.[107] В ЕКА Ветровая миссия ADM-Aeolus будет оснащена доплеровской лидарной системой для обеспечения глобальных измерений вертикальных профилей ветра.[108] В эксперименте использовалась доплеровская лидарная система. Летние Олимпийские игры 2008 года для измерения ветровых полей во время яхтенных соревнований.[109]
Доплеровские лидарные системы теперь также начинают успешно применяться в секторе возобновляемых источников энергии для получения данных о скорости ветра, турбулентности, отклонении ветра и сдвиге ветра. Используются как импульсные, так и непрерывные волновые системы. Импульсные системы используют синхронизацию сигнала для получения разрешения по вертикали, тогда как системы с непрерывной волной полагаются на фокусировку детектора.
Период, термин, эолики, был предложен для описания совместных и междисциплинарных исследований ветра с использованием компьютерного моделирования гидродинамики и измерений с помощью доплеровского лидара.[110]
Отражение от земли бортового лидара дает меру отражательной способности поверхности (при условии, что коэффициент пропускания атмосферы хорошо известен) на длине волны лидара, однако отражение от земли обычно используется для измерений поглощения атмосферы. При измерениях методом «лидара дифференциального поглощения» (DIAL) используются две или более близко расположенных (<1 нм) длин волн, чтобы вычесть отражательную способность поверхности, а также другие потери при передаче, поскольку эти факторы относительно нечувствительны к длине волны. При настройке на соответствующие линии поглощения определенного газа, измерения DIAL могут использоваться для определения концентрации (соотношения смешивания) этого конкретного газа в атмосфере. Это называется Интегрированное дифференциальное поглощение на тракте (IPDA), так как это мера интегрального поглощения по всей длине лидара. Лидары IPDA могут быть импульсными[111][112] или CW[113] и обычно используют две или более длин волн.[114] Лидары IPDA использовались для дистанционного зондирования углекислого газа[111][112][113] и метан.[115]
Синтетический массив лидар позволяет получать изображения с помощью лидара без необходимости в матричном детекторе. Его можно использовать для визуализации доплеровской велосиметрии, визуализации со сверхбыстрой частотой кадров (МГц), а также для пятнышко уменьшение когерентного лидара.[31] Грант дает обширную библиографию по лидарам для атмосферных и гидросферных приложений.[116]
Принцип Шаймпфлюга
Появился еще один лидарный метод дистанционного зондирования атмосферы. Он основан на Принцип Шаймпфлюга, именуемой Лидар Шаймпфлуга (слайдар).[117]
"Смысл принципа Шаймпфлюга состоит в том, что, когда лазерный луч передается в атмосферу, отраженное эхо всего освещающего объема зонда все еще находится в фокусе одновременно без уменьшения апертуры, пока плоскость объекта, плоскость изображения и плоскость линзы пересекаются. друг с другом".[118] Двумерная камера CCD / CMOS используется для разрешения отраженного эха переданного лазерного луча.
Таким образом, как и в случае традиционных лидарных технологий, источники непрерывного излучения, такие как диодные лазеры, могут использоваться для дистанционного зондирования вместо использования сложных наносекундных импульсных источников света.[118] Система SLidar также является надежной и недорогой системой, основанной на компактных лазерных диодах и матричных детекторах.[118][119][120]Непрерывный (CW) НЕТ2 Система DIAL, основанная на принципе Шаймпфлюга, была разработана с использованием в качестве источника света компактного мощного непрерывного многомодового лазерного диода 450 нм. Лазерное излучение на длинах волн в рабочем и автономном режиме NO2 Спектр поглощения реализуются настройкой инжекционного тока лазерного диода. Лидарные сигналы обнаруживаются датчиком изображения CCD с наклонной под углом 45 °, удовлетворяющим принципу Шаймпфлюга. Разрешенная по дальности НЕТ2 концентрации на почти горизонтальной трассе получены с помощью NO2 Система DIAL находится в диапазоне 0,3–3 км и хорошо согласуется с данными, измеренными традиционной станцией мониторинга загрязнения воздуха. Чувствительность обнаружения ± 0,9 ppbv при уровне достоверности 95% в диапазоне 0,3–1 км достигается при 15-минутном усреднении и разрешении по дальности 700 м в темное время суток, что позволяет точно измерять концентрацию NO в окружающей среде.2. Недорогая и надежная система DIAL, продемонстрированная в этой работе, открывает множество возможностей для области NO.2 приложения дистанционного зондирования.[121]
Правоохранительные органы
Лидарные скоростные пушки используются полицией для измерения скорости транспортных средств на ограничение скорости целей.[122] Кроме того, он используется в криминалистике для помощи при расследовании места преступления. Сканирование сцены выполняется для записи точных деталей размещения объекта, крови и другой важной информации для последующего просмотра. Эти сканы также могут использоваться для определения траектории пули в случае стрельбы.[123]
Военные
Известно, что некоторые военные приложения используются и классифицируются (например, измерение скорости на основе лидаров AGM-129 ACM ядерная крылатая ракета-невидимка), но ведется значительное количество исследований по их использованию для получения изображений. Системы с более высоким разрешением собирают достаточно деталей, чтобы идентифицировать цели, например танки. Примеры использования лидаров в военных целях включают в себя бортовую систему обнаружения мин (ALMDS) для борьбы с минами от компании Areté Associates.[124]
В отчете НАТО (RTO-TR-SET-098) оцениваются потенциальные технологии, позволяющие проводить дистанционное обнаружение для обнаружения боевых биологических агентов. Оценивались потенциальные технологии: длинноволновое инфракрасное излучение (LWIR), дифференциальное рассеяние (DISC) и флуоресценция, индуцированная ультрафиолетовым лазером (UV-LIF). В отчете сделан вывод, что: Основываясь на результатах испытанных и обсужденных выше лидарных систем, Целевая группа рекомендует, чтобы наилучшим вариантом для краткосрочного (2008–2010 гг.) Применения систем дистанционного обнаружения является UV-LIF. ,[125] однако в долгосрочной перспективе другие методы, такие как противостояние Рамановская спектроскопия может оказаться полезным для идентификации боевых биологических агентов.
Компактный спектрометрический лидар малого радиуса действия, основанный на лазерно-индуцированной флуоресценции (LIF), будет устранять присутствие биологических угроз в форме аэрозолей над критически важными внутренними, полузакрытыми и открытыми объектами, такими как стадионы, метро и аэропорты. Эта возможность работы в режиме, близком к реальному времени, позволит быстро обнаруживать выброс биоаэрозолей и позволит своевременно принимать меры по защите людей, находящихся на борту, и минимизировать степень загрязнения.[126]
Система обнаружения биологического противостояния на большом расстоянии (LR-BSDS) была разработана для армии США, чтобы обеспечить как можно более раннее предупреждение о биологической атаке. Это бортовая система на вертолете, предназначенная для обнаружения синтетических аэрозольных облаков, содержащих биологические и химические агенты, на большом расстоянии. LR-BSDS с дальностью обнаружения 30 км и более была введена в строй в июне 1997 года.[127] Пять лидаров производства немецкой компании Sick AG использовались для обнаружения на малых расстояниях Стэнли, то автономный автомобиль который выиграл 2005 DARPA Grand Challenge.
Робот Боинг AH-6 в июне 2010 г. совершил полностью автономный полет, в том числе объезд препятствий с помощью лидара.[128][129]
Добыча
Для расчета объемов руды осуществляется периодическое (ежемесячное) сканирование участков удаления руды с последующим сравнением данных на поверхности с данными предыдущего сканирования.[130]
Лидарные датчики также могут использоваться для обнаружения и предотвращения препятствий на роботизированных карьерных машинах, например, в автономной транспортной системе Komatsu (AHS).[131] используется в «Шахте будущего» компании Rio Tinto.
Физика и астрономия
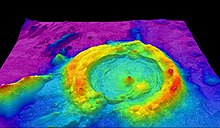
Всемирная сеть обсерваторий использует лидары для измерения расстояния до отражателей на Луне, позволяя измерять положение Луны с точностью до миллиметра и тесты общей теории относительности должно быть сделано. MOLA, то Марс Орбитальный лазерный высотомер, использованный лидаром на спутнике на орбите Марса (НАСА Mars Global Surveyor ) для создания потрясающе точной глобальной топографической съемки красной планеты. Лазерные высотомеры производили глобальные модели высоты Марса, Луны (Lunar Orbiter Laser Altimeter (LOLA)), Меркурия (Mercury Laser Altimeter (MLA)), NEAR – Shoemaker Laser Rangefinder (NLR).[132] Будущие миссии также будут включать эксперименты с лазерными высотомерами, такими как лазерный высотомер Ганимеда (GALA), в рамках миссии Jupiter Icy Moons Explorer (JUICE).[132]
В сентябре 2008 года НАСА Phoenix Lander использовал лидар для обнаружения снега в атмосфере Марса.[133]
В физике атмосферы лидар используется в качестве инструмента дистанционного обнаружения для измерения плотности определенных компонентов средней и верхней атмосферы, таких как калий, натрий, или молекулярный азот и кислород. Эти измерения можно использовать для расчета температуры. Лидар также можно использовать для измерения скорости ветра и предоставления информации о вертикальном распределении аэрозоль частицы.[134]
На JET термоядерная реакция исследовательский центр в Великобритании недалеко от Абингдон, Оксфордшир, лидар Томсоновское рассеяние используется для определения Электрон Профили плотности и температуры плазма.[135]
Механика горных пород
Лидар широко используется в механике горных пород для определения характеристик массива горных пород и обнаружения изменений уклона. Некоторые важные геомеханические свойства горной массы могут быть извлечены из трехмерных облаков точек, полученных с помощью лидара. Некоторые из этих свойств:
- Ориентация на разрыв [136][137][138]
- Расстояние между несплошностями и RQD [138][139][140]
- Апертура разрыва
- Сохранение прерывности [138][140][141]
- Неоднородность шероховатости [140]
- Проникновение воды
Некоторые из этих свойств были использованы для оценки геомеханического качества массива горных пород через RMR показатель. Более того, поскольку ориентации несплошностей могут быть извлечены с использованием существующих методологий, можно оценить геомеханическое качество склона породы через SMR показатель.[142] В дополнение к этому, сравнение различных трехмерных облаков точек на склоне, полученное в разное время, позволяет исследователям изучить изменения, произведенные на сцене в течение этого временного интервала в результате камнепадов или любых других оползневых процессов.[143][144][145]
ТОР
THOR - это лазер, предназначенный для измерения атмосферных условий Земли. Лазер попадает в облачный покров[146] и измеряет толщину возвратного ореола. Датчик имеет оптоволоконную апертуру шириной 7,5 дюймов, которая используется для измерения отраженного света.
Робототехника
Лидарная технология используется в робототехника для восприятия окружающей среды, а также для классификации объектов.[147] Способность лидарной технологии предоставлять трехмерные карты высот местности, высокоточного расстояния до земли и скорости приближения может обеспечить безопасную посадку роботизированных и пилотируемых транспортных средств с высокой степенью точности.[21] Лидары также широко используются в робототехнике для одновременная локализация и отображение и хорошо интегрированы в симуляторы роботов.[148] См. Дополнительные примеры в разделе «Военные» выше.
Космический полет
Лидар все чаще используется для дальномер и орбитальный элемент расчет относительная скорость в операции близости и канцелярские товары из космический корабль. Лидар также использовался для атмосферный исследования из космоса. Короткие импульсы лазерного света, излучаемые космическим кораблем, могут отражаться от крошечных частиц в атмосфере и возвращаться обратно в телескоп, совмещенный с лазером космического корабля. Точно синхронизируя «эхо» лидара и измеряя, сколько лазерного света получает телескоп, ученые могут точно определить местоположение, распределение и природу частиц. В результате появился революционно новый инструмент для изучения составляющих атмосферы, от облачных капель до промышленных загрязнителей, которые трудно обнаружить другими способами ».[149][150]
Лазерная альтиметрия используется для изготовления цифровые карты высот планет, в том числе Орбитальный лазерный высотомер Марса (MOLA) картографирование Марса,[151] то Лунный орбитальный лазерный высотомер (ЛОЛА)[152] и составление карты Луны с помощью лунного высотомера (LALT) и карты Меркурия с помощью лазерного высотомера Меркурия (MLA).[153]
Геодезия

Авиационные лидарные датчики используются компаниями в области дистанционного зондирования. Их можно использовать для создания ЦМР (Цифровая модель местности) или ЦМР (Цифровая модель рельефа ); это довольно распространенная практика для больших территорий, поскольку самолет может преодолевать полосы шириной 3–4 км за один пролет. Более высокая точность по вертикали ниже 50 мм может быть достигнута с помощью более низкой эстакады, даже в лесах, где она может дать высоту навеса, а также высоту земли. Как правило, приемник GNSS, настроенный на контрольную точку с географической привязкой, необходим для связи данных с WGS (Мировая геодезическая система ).[154]
LiDAR также используются в гидрографические съемки. В зависимости от прозрачности воды LiDAR может измерять глубину от 0,9 м до 40 м с вертикальной точностью 15 см и горизонтальной точностью 2,5 м.[155]
Лесное хозяйство
Лидарные системы также применялись для улучшения управления лесным хозяйством.[156] Измерения используются для инвентаризации на лесных участках, а также для расчета высоты отдельных деревьев, ширины кроны и диаметра кроны. Другой статистический анализ использует лидарные данные для оценки общей информации о графике, такой как объем растительного покрова, средняя, минимальная и максимальная высота, а также оценки растительного покрова. Аэрофотоснимок LiDAR использовался для картирования лесных пожаров в Австралии в начале 2020 года. Данные были обработаны для просмотра голой земли и выявления здоровой и сгоревшей растительности.[157]
Транспорт

Лидар использовался в железнодорожной отрасли для создания отчетов о состоянии активов для управления активами и транспортными департаментами для оценки состояния дорог. CivilMaps.com - ведущая компания в этой области.[158] Лидар использовался в Адаптивный круиз-контроль (ACC) системы для автомобилей. Такие системы, как Siemens, Hella, Ouster и Cepton, используют лидарное устройство, установленное на передней части транспортного средства, например на бампере, для отслеживания расстояния между транспортным средством и любым транспортным средством перед ним.[159] В случае, если впереди идущий автомобиль замедляется или приближается к нему, ACC задействует тормоза, чтобы замедлить автомобиль. Когда дорога впереди свободна, ACC позволяет автомобилю разгоняться до скорости, заданной водителем. См. Дополнительные примеры в разделе «Военные» выше. Лидарное устройство, Облакомер используется в аэропортах по всему миру для измерения высоты облаков на траекториях подхода к взлетно-посадочной полосе.[160][нужна цитата ]
Оптимизация ветропарка
Лидар может использоваться для увеличения выхода энергии из ветряные электростанции путем точного измерения скорости ветра и турбулентности ветра.[161][162] Экспериментальные лидарные системы[163][164] может быть установлен на гондола[165] из ветряная турбина или встроен во вращающийся спиннер[166] для измерения встречных горизонтальных ветров,[167] ветры следуют за ветряком,[168] и упреждающе регулируйте лезвия для защиты компонентов и увеличения мощности. Лидар также используется для характеристики падающего ветрового ресурса для сравнения с выработкой энергии ветряной турбиной для проверки производительности ветряной турбины.[169] путем измерения кривой мощности ветряной турбины.[170] Оптимизация ветропарка может быть рассмотрена в прикладные эолики. Еще одним аспектом лидаров в ветроэнергетике является использование вычислительная гидродинамика над поверхностями, сканированными с помощью лидаров, для оценки ветрового потенциала,[171] которые можно использовать для оптимального размещения ветряных электростанций.
Оптимизация солнечной фотоэлектрической установки
Лидар также можно использовать для помощи проектировщикам и разработчикам в оптимизации солнечной энергии. фотоэлектрический системы на уровне города, определив соответствующие кровли [172][173] и для определения затенение убытки.[174] Недавние усилия по воздушному лазерному сканированию были сосредоточены на способах оценки количества солнечного света, попадающего на вертикальные фасады зданий.[175] или путем включения более подробных потерь затенения с учетом влияния растительности и более обширной окружающей местности.[176]
Видеоигры
Последние гоночные симуляторы, такие как rFactor Pro, iRacing, Assetto Corsa и Project CARS все чаще используются гоночные треки, воспроизводимые из трехмерных облаков точек, полученных с помощью лидарных съемок, в результате чего поверхности воспроизводятся с точностью до сантиметра или миллиметра в игровой трехмерной среде.[177][178][179]
Исследовательская игра 2017 года Сканер Сомбре, от Программное обеспечение для интроверсии, использует лидар как фундаментальную игровую механику.
Другое использование
Видео на песню "Карточный домик " от Radiohead Считалось, что это первое использование трехмерного лазерного сканирования в реальном времени для записи музыкального видео. Данные о дальности в видео не полностью получены с лидара, поскольку также используется сканирование структурированного света.[180]
Альтернативные технологии
Недавнее развитие Структура от движения (SFM) технологии позволяют создавать трехмерные изображения и карты на основе данных, извлеченных из визуальной и инфракрасной фотографии. Высота или трехмерные данные извлекаются с использованием нескольких параллельных проходов по нанесенной на карту области, что дает визуальные световые изображения и трехмерную структуру с одного и того же датчика, который часто специально выбирается и калибруется. цифровая камера.[нужна цитата ]
Смотрите также
- Атомарный линейный фильтр - Оптический полосовой фильтр, используемый в физических науках
- Облакомер - Наземный лидар для измерения высоты облаков
- Турбулентность при ясном небе
- CLidar
- Геодиметр
- iPad Pro (4-го поколения) - Модель Apple iPad Pro 2020 года
- iPhone 12 Pro / 12 Pro Max
- Лазерный дальномер
- Формат файла LAS
- libLAS - Библиотека C ++ под лицензией BSD для чтения / записи данных лидара ASPRS LAS
- Лидарный детектор
- Список лазерных статей - Статья со списком Википедии
- Национальный лидарный набор данных (все страны)
- Национальный лидарный набор данных (США)
- Optech
- Обнаружение оптического гетеродина
- Оптический рефлектометр во временной области
- Фотограмметрия - Проведение измерений с помощью фотографии
- Дальность изображения - Техника создания 2D-изображения, показывающего расстояние до точек сцены от конкретной точки.
- Спутниковая лазерная локация
- Картографирование морского дна # LiDAR
- СОДАР
- Рефлектометрия во временной области
- TopoFlight
использованная литература
- ^ а б Оксфордский словарь английского языка. 2013. с. Запись на "лидар".
- ^ а б Джеймс Ринг, «Лазер в астрономии». стр. 672–73, Новый ученый 20 июня 1963 г.
- ^ «ЛИДАР - обнаружение света и определение дальности - это метод дистанционного зондирования, используемый для исследования поверхности Земли». NOAA. Архивировано из оригинал 30 мая 2013 г.. Получено 4 июня, 2013.
- ^ Трэвис С. Тейлор (2019), Введение в лазерную науку и технику, CRC Press. [1]
- ^ Джи Шань и Чарльз К. Тот (2018), Топографическая лазерная дальнометрия и сканирование: принципы и обработка, Второе издание, CRC Press, [2]
- ^ а б c Cracknell, Arthur P .; Хейс, Ладсон (2007) [1991]. Введение в дистанционное зондирование (2-е изд.). Лондон: Тейлор и Фрэнсис. ISBN 978-0-8493-9255-9. OCLC 70765252.
- ^ а б Лим, Хейзел Си Мин; Taeihagh, Араз (2019). «Принятие алгоритмических решений в AV: понимание этических и технических проблем для умных городов». Устойчивость. 11 (20): 5791. arXiv:1910.13122. Дои:10.3390 / su11205791.
- ^ «Хотите покататься на самоуправляемой машине? Вот на что это похоже». futurism.com. 2018-02-28. Получено 28 апреля 2020.
- ^ «Новая радиолокационная система». Одесса Американская. 28 февраля 1961 г.
- ^ а б Макомбер, Франк (3 июня 1963 г.). «Космические эксперты ищут ремни для мощного ЛАЗЕРНОГО света». Бейкерсфилд калифорнийский (стр. 5). Служба новостей Копли. Получено 11 июля 2019.
- ^ Стич (21 апреля 1961 г.). Электроника. 51: 2. Отсутствует или пусто
| название =(Помогите) - ^ «Лазерные измерения расстояния». Линкольн Журнал Звезда (стр.6). 29 марта 1963 г.
- ^ Гойер, Г. Г .; Р. Уотсон (сентябрь 1963 г.). «Лазер и его применение в метеорологии». Бюллетень Американского метеорологического общества. 44 (9): 564–575 [568]. Bibcode:1963БАМС ... 44..564Г. Дои:10.1175/1520-0477-44.9.564.
- ^ "НАЖМИТЕ". Lidar.cr.usgs.gov. 2015-09-16. Архивировано из оригинал на 2016-02-19. Получено 2016-02-22.
- ^ "Поиск NYTimes.com". nytimes.com. Получено 2017-04-07.
- ^ «Самоуправляемое подразделение Waymo обратилось в суд с иском к инженеру Uber». nytimes.com. 2017-03-29. Получено 2017-04-07.
- ^ Картер, Джейми; Кейл Шмид; Кирк Уотерс; Линди Бетцхолд; Брайан Хэдли; Ребекка Матаоски; Дженнифер Халлеран (2012). «Лидар 101: Введение в технологию, данные и приложения лидаров». (NOAA) Центр прибрежных услуг " (PDF). Coast.noaaa.gov. п. 14. Получено 2017-02-11.
- ^ Philosophical Magazine and Journal of Science, 1930, Series 7, Volume 9, Issue 60, pp. 1014–1020.
- ^ Donegan, J.F .; Жизнь и творчество Эдварда Хатчинсона Синджа стр. 31, 67, (в соавторстве с Д. Уиром и П. Флоридес ), Пёллауберг, Австрия: Living Edition, ISBN 3901585176
- ^ «Экспериментальный лидар перспективных перспективных исследований», USGS.gov. Проверено 8 августа 2007 года.
- ^ а б Амзаердян, Фарзин; Pierrottet, Diego F .; Петуэй, Ларри Б.; Hines, Glenn D .; Робак, Винсент Э. (24 мая 2011 г.). «Лидарные системы точной навигации и безопасной посадки на планетные тела». Международный симпозиум по фотоэлектронному обнаружению и визуализации 2011: лазерное зондирование и визуализация; и биологические и медицинские применения фотонного зондирования и визуализации. 8192: 819202. Bibcode:2011SPIE.8192E..02A. Дои:10.1117/12.904062. HDL:2060/20110012163. S2CID 28483836. Получено 24 мая, 2011.
- ^ П. Дакин, Джон; Браун, Роберт (2017). Справочник по оптоэлектронике: концепции, устройства и методы (том первый). CRC Press. п. 678. ISBN 978-1-4822-4179-2.
- ^ Рашид Анатольевич Ганеев (2013-10-17). Лазер - взаимодействие поверхности. Springer Science & Business Media, 2013. п. 32. ISBN 9789400773417.
- ^ а б Ошибка цитирования: указанная ссылка
Cracknellбыл вызван, но не определен (см. страница помощи). - ^ а б c d е ж Моки, Ник (2018-03-15). «Беспилотный автомобиль на каждой подъездной дорожке? Твердотельный лидар - ключ к успеху». Цифровые тенденции. Получено 2018-06-15.
- ^ Ли, Тимоти Б. (1 февраля 2019 г.). «Как 10 ведущих компаний пытаются создать мощный и недорогой лидар». Ars Technica.
- ^ "Дистанционные датчики | Земные данные". earthdata.nasa.gov. Получено 2017-03-18.
 Эта статья включает текст из этого источника, который находится в всеобщее достояние.
Эта статья включает текст из этого источника, который находится в всеобщее достояние. - ^ "Advanced Scientific Concepts Inc". advancedscientificconcepts.com. Получено 2019-03-11.
- ^ Медина, Антонио. «Трехмерная камера и дальномер». Январь 1992 г. Патент США 5081530. Цитировать журнал требует
| журнал =(Помогите) - ^ Медина А, Гая Ф, Посо Ф (2006). «Компактный лазерный радар и трехмерная камера». J. Opt. Soc. Am. А. 23 (4): 800–805. Bibcode:2006JOSAA..23..800M. Дои:10.1364 / josaa.23.000800. PMID 16604759.
- ^ а б Штраус, К. Э. М. (1994). «Обнаружение гетеродина с синтетической решеткой: одноэлементный детектор действует как матрица». Опт. Латыш. 19 (20): 1609–1611. Bibcode:1994OptL ... 19.1609S. Дои:10.1364 / ол.19.001609. PMID 19855597.
- ^ «Самый мощный в мире трехмерный лазерный сканер». technologyreview.com. 2014-02-13. Получено 2017-04-06.
- ^ Талбот, Дэвид (13 февраля 2014 г.). «Новый оптический чип улучшит качество военных и археологических аэрофотоснимков». Обзор технологий MIT. Получено 2014-02-17.
- ^ а б "Advanced Scientific Concepts Inc". advancedscientificconcepts.com. Получено 2019-03-08.
- ^ «Пассивные и активные датчики в дистанционном зондировании». ГИС География. 2015-02-09. Получено 2019-03-08.
- ^ «Детали патента». technology.nasa.gov. Получено 2019-03-08.
- ^ «Аналого-цифровое преобразование: выборка». cl.cam.ac.uk. Получено 2019-03-08.
- ^ «Лидар с фотовспышкой для автономной безопасной посадки и эксплуатации космических аппаратов в непосредственной близости» (PDF). https://ntrs.nasa.gov. 2019-05-07. Внешняя ссылка в
| сайт =(Помогите) - ^ Дитрих, Энн Браун, «Поддержка автономной навигации с помощью снимков с помощью флеш-лидара вблизи малых небесных тел» (2017). CU Boulder Аспирантура и диссертации по аэрокосмической технике. 178.
- ^ а б Фоссельман, Джордж; Маас, Ханс-Герд (2012). Воздушное и наземное лазерное сканирование. Издательство Whittles. ISBN 978-1-904445-87-6.
- ^ Doneus, M .; Miholjek, I .; Mandlburger, G .; Doneus, N .; Verhoeven, G .; Briese, Ch .; Прегесбауэр, М. (2015). «Авиационная лазерная батиметрия для документирования затопленных археологических памятников на мелководье». ISPRS - Международный архив фотограмметрии, дистанционного зондирования и пространственной информации. XL-5 / W5: 99–107. Bibcode:2015ISPArXL55 ... 99D. Дои:10.5194 / isprsarchives-xl-5-w5-99-2015.
- ^ Чиу, Ченг-Лунг; Фэй, Ли-Юань; Лю, Цзинь-Кинг; У, Мин-Чи. «Национальное авиалидарное картографирование и примеры для применения при глубинных оползнях на Тайване». Симпозиум по геонаукам и дистанционному зондированию (IGARSS), 2015 IEEE International. ISSN 2153-7003.
- ^ а б Юань, Цзэн; Юйцзинь, Чжао; Дэн, Чжао; Бинфан, Ву. «Картирование биоразнообразия лесов с использованием аэроснимков и гиперспектральных данных». Симпозиум по геонаукам и дистанционному зондированию (IGARSS), 2016 IEEE International. ISSN 2153-7003.
- ^ Зеленый лидар Найеганди
- ^ Уилсон, Джерри С. (2008). «Использование бортовых гидрографических LiDAR для поддержки картографирования вод Калифорнии». ОКЕАНЫ 2008 - MTS / IEEE Kobe Techno-Ocean. С. 1–8. Дои:10.1109 / OCEANSKOBE.2008.4530980. ISBN 978-1-4244-2126-8. S2CID 28911362.
- ^ Тан, Лина; Шао, Гофань (21.06.2015). «Дистанционное зондирование с помощью дронов для исследований и практики в лесном хозяйстве». Журнал исследований лесного хозяйства. 26 (4): 791–797. Дои:10.1007 / s11676-015-0088-у. ISSN 1007-662X. S2CID 15695164.
- ^ Ли, Санг-Мук; Джун Им, Чжон; Ли, Бо-Хи; Леонесса, Александр; Курдила, Андрей. «Создание карты сетки в реальном времени и классификация объектов для наземных 3D-лидарных данных с использованием методов анализа изображений». Обработка изображений (ICIP), 2010 17-я Международная конференция IEEE по обработке изображений. ISSN 1522-4880.
- ^ «Исследование ARS помогает фермерам наилучшим образом использовать удобрения». Служба сельскохозяйственных исследований Министерства сельского хозяйства США. 9 июня 2010 г.
- ^ Брайдегаард, Миккель; Брайдегаард, Миккель; Брайдегаард, Миккель; Брайдегаард, Миккель; Киркеби, Карстен; Киркеби, Карстен; Игнелл, Рикард; Янссон, Самуэль; Янссон, Самуэль (14 мая 2017 г.). «Мультиспектральная поляриметрическая модуляционная спектроскопия для определения вида и пола переносчиков малярии». Конференция по лазерам и электрооптике (2017), доклад ATh1B.2. Оптическое общество Америки: ATh1B.2. Дои:10.1364 / CLEO_AT.2017.ATh1B.2. ISBN 978-1-943580-27-9. S2CID 21537355.
- ^ «Усовершенствования в системах оптического дистанционного зондирования воздушной и водной фауны или связанные с ними и их использование». Патенты Google. Получено 4 июн 2019.
- ^ а б Вайс, Ульрих; Бибер, Питер; Laible, Стефан; Больманн, Карстен; Зелл, Андреас (2010). Классификация видов растений с использованием 3D-лидара и машинного обучения. Девятая международная конференция по машинному обучению и приложениям (ICMLA). ISBN 978-1-4244-9211-4.
- ^ «ВИЗ; кратер под навесом». Unb.ca. 2013-02-18. Получено 2013-05-06.
- ^ The Light Fantastic: использование лидара в археологических исследованиях. Английское наследие. 2010. с. 45.
- ^ Джон Нобель Уилфорд (10.05.2010). «Картографирование древней цивилизации в считанные дни». Газета "Нью-Йорк Таймс. Получено 2010-05-11.
- ^ Стефани Паппас (15 мая 2013 г.). «Руины затерянного города могут таиться глубоко в тропическом лесу Гондураса». Живая наука. Получено 15 мая, 2013.
- ^ Дуглас Престон (2 марта 2015 г.). «Затерянный город обнаружен в тропическом лесу Гондураса». Национальная география. Получено 3 марта 2015.
- ^ «Джунгли сдают потерянный город». Smh.com.au. 2013-06-14. Получено 2016-02-22.
- ^ Джонсон, Кэтрин М; Ouimet, Уильям Б. (2014). «Повторное открытие утерянного археологического ландшафта южной части Новой Англии с использованием системы обнаружения и определения дальности с помощью бортового света (LiDAR)». Журнал археологической науки. 43: 9–20. Дои:10.1016 / j.jas.2013.12.004.
- ^ Эдвин Картлидж (10.01.2014). "Лазеры раскрывают затерянный" агрополис "Новой Англии | Наука | AAAS". News.sciencemag.org. Получено 2016-02-22.
- ^ ""Утраченная «Новая Англия, обнаруженная высокотехнологичной археологией». News.nationalgeographic.com. 2014-01-03. Получено 2016-02-22.
- ^ Evans, D.H .; Fletcher, R.J .; и другие. (2013). «Выявление археологических ландшафтов Ангкора с помощью лидара». PNAS. 110 (31): 12595–12600. Bibcode:2013ПНАС..11012595E. Дои:10.1073 / pnas.1306539110. ЧВК 3732978. PMID 23847206.
- ^ Дэвис, Никола (15 февраля 2018 г.). "Лазерное сканирование показывает, что в" затерянном "древнем мексиканском городе" столько же зданий, сколько на Манхэттене'". Хранитель - через www.theguardian.com.
- ^ «Сканы LiDAR показывают сложную сеть дорог цивилизации майя». smithsonianmag.com. Получено 28 февраля, 2018.
- ^ «Древние майяские супермагистрали, обнаруженные в джунглях Гватемалы». 2017-01-27.
- ^ «Эта древняя цивилизация была вдвое больше средневековой Англии». 2018-02-01. Получено 2018-02-05.
- ^ «Археологи с помощью лазеров находят древние затерянные города». msn.com. Получено 2019-09-08.
- ^ «Эта древняя цивилизация была вдвое больше средневековой Англии». Новости National Geographic. 2018-02-01. Получено 2019-09-08.
- ^ «В джунглях Гватемалы обнаружена обширная сеть майя». 2018-02-02.
- ^ «С ПОМОЩЬЮ ЛАЗЕРОВ АРХЕОЛОГИ НАЙТИ УТЕРЯННЫЕ ГОРОДА ДРЕВНЕЙ МАЯНЫ В ГВАТЕМАЛЕ». NEWSWEEK. 2018-09-29.
- ^ Маленькая, Бекки. «Лазеры открыли 60 000 древних построек майя в Гватемале». ИСТОРИЯ. Получено 2019-09-08.
- ^ «Скрытый древний мегаполис майя с 60 000 построек, обнаруженных в Гватемале с помощью лазеров». yahoo.com. Получено 2019-09-08.
- ^ Берке, Джереми (2018-02-02). «Археологи нашли тысячи скрытых построек в гватемальских джунглях - и это может переписать историю человечества». Business Insider. Получено 2019-09-08.
- ^ «СКРЫТЫЙ ДРЕВНИЙ МАЯНСКИЙ« МЕГАЛОПОЛИС »С 60000 СТРУКТУР, ОБНАРУЖЕННЫХ В ГВАТЕМАЛЕ С ИСПОЛЬЗОВАНИЕМ ЛАЗЕРОВ». NEWSWEEK. 2018-02-02.
- ^ Чуквура, Драгоценный (30.09.2018). «С помощью лазеров археологи обнаружили древний затерянный город майя в Северной Гватемале». Новости развлечений Нигерии, музыка, видео, стиль жизни. Получено 2019-09-08.
- ^ Венер, Майк (2018-02-02). «Археологи обнаружили древний мегаполис майя, спрятанный в гватемальских джунглях». BGR. Получено 2019-09-08.
- ^ Стив Таранович, EDN. "Автономные автомобильные датчики: как алгоритмы процессора получают свои входные данные. "5 июля, 2016. Проверено 9 августа, 2016.
- ^ «Филиппинец превращает обычный автомобиль в автономное транспортное средство - Motioncars | Motioncars». Motioncars.inquirer.net. 2015-05-25. Получено 2016-02-22.
- ^ «Изучите и сравните различные цифровые лидарные датчики Ouster». 2020-06-23. Получено 2020-06-23.
- ^ "Интеллектуальные мощные лидарные решения | Велодин Лидар". 2020-06-23. Получено 2020-06-23.
- ^ «Автономная система прогнозирования решений 3D Laser». 2013-01-24. Получено 2013-05-06.
- ^ "Продукты". Velodynelidar.com. Получено 2016-02-22.
- ^ «Лидарные имитационные модели». 2018-06-26. Получено 2018-06-26.
- ^ а б Такаги, Киёкадзу; Морикава, Кацухиро; Огава, Такаши; Сабури, Макото (2006). Распознавание дорожной среды с помощью бортового лидара. Симпозиум IEEE по интеллектуальным автомобилям. Дои:10.1109 / IVS.2006.1689615. ISBN 978-4-901122-86-3. S2CID 15568035.
- ^ Хасирлиоглу, Синан; Каманн, Александр; Дорик, Игорь; Брандмайер, Томас (2016). «Методика испытаний воздействия дождя на автомобильные датчики окружающего звука». 19-я Международная конференция IEEE по интеллектуальным транспортным системам (ITSC), 2016 г.. С. 2242–2247. Дои:10.1109 / ITSC.2016.7795918. ISBN 978-1-5090-1889-5. S2CID 2334608.
- ^ а б c Линднер, Филипп; Ванилик, Герд (2009). Обработка 3D-лидаров для безопасности транспортных средств и распознавания окружающей среды. Семинар IEEE по вычислительному интеллекту в транспортных средствах и транспортных системах. Дои:10.1109 / CIVVS.2009.4938725. ISBN 978-1-4244-2770-3. S2CID 18520919.
- ^ Хван, Сунмин; Ким, Намил; Чой, Юкён; Ли, Сокджу; Со Квеон, Ин (2016). Быстрое обнаружение и отслеживание множественных объектов с помощью цветной камеры и 3D-лидара для интеллектуальных транспортных средств. 13-я Международная конференция по повсеместным роботам и окружающему интеллекту (URAI). ISBN 978-1-5090-0821-6.
- ^ Ченг, Мин-Мин; Чжан, Цзымин; Линь, Вэнь-Янь; Торр, Филипп (2014). BING: бинаризованные нормированные градиенты для оценки объектности со скоростью 300 кадров в секунду. Конференция IEEE по компьютерному зрению и распознаванию образов. ISBN 978-1-4799-5118-5.
- ^ Гиршик, Росс (2015). «Быстрый R-CNN». Международная конференция IEEE по компьютерному зрению (ICCV), 2015 г.. С. 1440–1448. Дои:10.1109 / ICCV.2015.169. ISBN 978-1-4673-8391-2. S2CID 206770307.
- ^ Э. Джонсон, Эндрю; Эбер, Марсьяль (1999). «Использование вращающихся изображений для эффективного распознавания объектов в загроможденных трехмерных сценах» (PDF). IEEE Transactions по анализу шаблонов и машинному анализу. 21 (5): 433–449. Дои:10.1109/34.765655. ISSN 0162-8828.
- ^ Сюй, Филипп; Давуан, Франк; Дено, Тьерри (сентябрь 2014 г.). «Доказательная комбинация пешеходных датчиков». Труды Британской конференции по машинному зрению, BMVA Press.
- ^ Чжоу, Кун; Ван, Сицинь; Томизукат, Масаёши; Чжан, Вэй-Бинь; Чант, Чинг-Яо (2002). Новый алгоритм отслеживания маневрирующей цели с оценкой входных данных. Труды Американской конференции по контролю 2002 г.. Дои:10.1109 / ACC.2002.1024798. ISBN 978-0-7803-7298-6. S2CID 114167319.
- ^ Ю. Хата, Альберто; Ф. Вольф, Денис. «Обнаружение признаков для локализации транспортных средств в городских условиях с использованием многослойного лидара». IEEE Transactions по интеллектуальной транспортной системе. 17 (2). ISSN 1558-0016.
- ^ Гиббс, Сэмюэл (7 сентября 2015 г.). «Хакеры могут обмануть беспилотные автомобили и заставить их уклоняться». Хранитель.
- ^ «Лидарные ссылки, используемые при картировании». Lidarbasemaps.org. Получено 2016-02-22.
- ^ Clawges, Рик; Фирлинг, Керри; Вирлинг, Ли; Роуэлл, Эрик (15 мая 2008 г.). «Использование лидара для оценки разнообразия видов птиц, их плотности и встречаемости в сосновом / осиновом лесу». Дистанционное зондирование окружающей среды. 112 (5): 2064–2073. Bibcode:2008RSEnv.112.2064C. Дои:10.1016 / j.rse.2007.08.023. ISSN 0034-4257.
- ^ Моэслунд, Джеспер Эреншельд; Злински, Андраш; Эйрнес, Расмус; Брунбьерг, Ане Кирстине; Бохер, Педер Клит; Свеннинг, Йенс-Кристиан; Норманд, Сигне (2019-01-04). «LIDAR объясняет разнообразие растений, грибов, лишайников и мохообразных в различных средах обитания и на больших географических территориях». Дои:10.1101/509794. S2CID 92548355. Цитировать журнал требует
| журнал =(Помогите) - ^ Саймонсон, Уильям Д .; Аллен, Харриет Д .; Кумс, Дэвид А. (05.07.2014). «Применение бортовых лидаров для оценки видового разнообразия животных». Методы в экологии и эволюции. 5 (8): 719–729. Дои:10.1111 / 2041-210x.12219. ISSN 2041–210X.
- ^ Вальдес, Хосе; Брунбьерг, Ане Кирстине; Флёйгаард, Камилла; Долби, Ларс; Клаузен, Кевин К .; Пяртель, Меэлис; Пфайфер, Норберт; Холлаус, Маркус; Виммер, Майкл Х .; Эйрнес, Расмус; Моэслунд, Джеспер Эреншельд (2020-07-03). «Изучение драйверов темного разнообразия макрогрибков с помощью LiDAR». bioRxiv: 2020.07.02.185553. Дои:10.1101/2020.07.02.185553. S2CID 220366209.
- ^ Советник Ежеквартально, лето 2007 г., том 6, выпуск 3
- ^ Hughes, M. W .; Куигли, M.C; van Ballegooy, S .; Deam, B.L .; Брэдли, Б. А .; Харт, Д. Э. (2015). «Тонущий город: землетрясения увеличивают опасность наводнений в Крайстчерче, Новая Зеландия». GSA сегодня. 25 (3): 4–10. Дои:10.1130 / Геология. Получено 2016-02-22.
- ^ Рабатель, Антуан; Делайн, Филипп; Jaillet, Стефан; Раванель, Людовик (28 мая 2008 г.). «Каменные падения в высокогорных скальных стенах, количественно оцененные с помощью наземных лидарных измерений: тематическое исследование в районе Монблана». Письма о геофизических исследованиях. 35 (10): L10502. Bibcode:2008GeoRL..3510502R. Дои:10.1029 / 2008GL033424.
- ^ Каннингем, Диксон; Гребби, Стивен; Тэнси, Кевин; Госар, Андрей; Кастелич, Ваня (2006). «Применение бортового LiDAR для картирования сейсмогенных разломов в лесистой горной местности, юго-восточные Альпы, Словения» (PDF). Письма о геофизических исследованиях. 33 (20): L20308. Bibcode:2006GeoRL..3320308C. Дои:10.1029 / 2006GL027014. ISSN 1944-8007.
- ^ «ЛИДАР показывает, где риск землетрясений самый высокий». Seattlepi.com. 2001-04-17. Получено 2016-02-22.
- ^ "Данные лидаров горы Сент-Хеленс", Архив геопространственных данных штата Вашингтон (13 сентября 2006 г.). Проверено 8 августа 2007 года.
- ^ «Воздушный топографический картограф», NASA.gov. Проверено 8 августа 2007 года.
- ^ Ли, Т. (2011). «Тенденция температуры средней атмосферы и солнечный цикл, выявленные долгосрочными лидарными наблюдениями Рэлея» (PDF). J. Geophys. Res. 116: D00P05. Bibcode:2011JGRD..116.0P05L. Дои:10.1029 / 2010jd015275.
- ^ Томас Д. Вилкерсон, Гири К. Швеммер и Брюс М. Джентри. ЛИДАР-профилирование аэрозолей, облаков и ветра доплеровскими и недоплеровскими методами, Международный проект НАСА H2O (2002) В архиве 2007-08-22 на Wayback Machine.
- ^ 'Исследователи Земли: ADM-Aeolus', ESA.org (Европейское космическое агентство, 6 июня 2007 г.). Проверено 8 августа 2007 года.
- ^ «Доплеровский лидар дает олимпийским морякам преимущество», Optics.org (3 июля 2008 г.). Проверено 8 июля 2008 года.
- ^ Клайв, П. Дж. М., Возникновение эоликов, Университет Стратклайда на TEDx (2014). Дата обращения 9 мая 2014.
- ^ а б Koch, Grady J .; Барнс, Брюс В.; Петрос, Мулугета; Бейон, Джеффри Y; Амзаердян, Фарзин; Ю, Цзиронг; Дэвис, Ричард Э; Исмаил, Сайед; Вэй, Стефани; Кавая, Майкл Дж; Сингх, Упендра Н. (2004). «Когерентные измерения дифференциальной абсорбции лидаром СО2». Прикладная оптика. 43 (26): 5092–5099. Bibcode:2004ApOpt..43,5092K. Дои:10.1364 / AO.43.005092. PMID 15468711.
- ^ а б Абшир, Джеймс Б.; Раманатан, Ананд; Ририс, Харис; Мао, Цзяньпин; Allan, Graham R .; Hasselbrack, William E .; Уивер, Кларк Дж .; Брауэлл, Эдвард В. (30 декабря 2013 г.). «Воздушные измерения концентрации и диапазона CO2 в колонке с использованием импульсного лидара IPDA прямого обнаружения». Дистанционное зондирование. 6 (1): 443–469. Bibcode:2013RemS .... 6..443A. Дои:10.3390 / RS6010443.
- ^ а б Кэмпбелл, Джоэл Ф. (2013). «Метод нелинейной развертки частоты для измерений CO2 с использованием системы непрерывного лазера». Прикладная оптика. 52 (13): 3100–3107. arXiv:1303.4933. Bibcode:2013ApOpt..52.3100C. Дои:10.1364 / AO.52.003100. PMID 23669780. S2CID 45261286.
- ^ Доблер, Джереми Т .; Харрисон, Ф. Уоллес; Брауэлл, Эдвард V .; Линь, Бинг; МакГрегор, Дуг; Куи, Сьюзен; Чхве, Ёнхун; Исмаил, Сайед (2013). "Измерения атмосферного столба CO2 с помощью бортового лазерного лидара длиной 1,57 мкм непрерывного излучения с модуляцией интенсивности". Прикладная оптика. 52 (12): 2874–2892. Bibcode:2013ApOpt..52.2874D. Дои:10.1364 / AO.52.002874. PMID 23669700.
- ^ Ририс, Харис; Нумата, Кендзи; Ли, Стив; Ву, Стюарт; Раманатан, Ананд; Доуси, Марта; Мао, Цзяньпин; Кава, Рэндольф; Абшир, Джеймс Б. (2012-12-01). «Авиационные измерения содержания столба метана в атмосфере с использованием импульсного лидара дифференциального поглощения со интегральной трассой». Прикладная оптика. 51 (34): 8296–305. Bibcode:2012ApOpt..51.8296R. Дои:10.1364 / AO.51.008296. ISSN 1539-4522. PMID 23207402. S2CID 207299203.
- ^ Грант У. Б. Лидар для атмосферных и гидросферных исследований. Настраиваемые лазерные приложения, 1-е издание, Дуарте, Ф. Дж. Эд. (Марсель Деккер, Нью-Йорк, 1995) Глава 7.
- ^ Лян Мей, Миккель Брайдегаард, Лидар с непрерывным дифференциальным поглощением, Laser and Photonics Reviews 9, 629-636 (2015)
- ^ а б c Мэй, Лян (2016-08-08). Дистанционное зондирование атмосферного аэрозоля и газа с помощью шаймпфлюг-лидара на основе диодных лазеров. Симпозиум по прогрессу в области электромагнитных исследований (PIERS). ISBN 978-1-5090-6094-8.
- ^ Лян Мей и Миккель Брайдегаард, "Мониторинг атмосферных аэрозолей с помощью эластичной лидарной системы Шаймпфлюга", Опт. Экспресс 23, A1613-A1628 (2015)
- ^ Лян Мэй, Пэн Гуань, Ян Ян и Чжэн Конг, "Восстановление и проверка коэффициента атмосферной экстинкции для методики однозонного лидара Шеймпфлуга с рассеянием Ми", Опт. Экспресс 25, A628-A638 (2017)
- ^ Лян Мэй; Пэн Гуань; Чжэн Конг (2017). «Дистанционное зондирование атмосферного NO2 за счет использования лидарного метода непрерывного дифференциального поглощения ». Оптика Экспресс. 25 (20): A953 – A962. Bibcode:2017OExpr..25A.953M. Дои:10.1364 / OE.25.00A953. PMID 29041305.
- ^ Гонглах, Мэтт. "Как работают полицейские лазерные пушки".
- ^ "Криминалистика | ФАРО Технологии".
- ^ "Арете". Архивировано из оригинал 4 сентября 2011 г.
- ^ «Лазерное обнаружение биологических агентов НАТО». Rta.nato.int. Архивировано из оригинал на 2011-07-20. Получено 2013-05-06.
- ^ «Датчик обнаружения биоаэрозольной угрозы ближнего действия (SR-BioSpectra)». Ino.ca. Получено 2013-05-06.
- ^ "Оборона и безопасность, разведка и анализ: IHS Jane's | IHS". Articles.janes.com. Получено 2016-02-22.
- ^ Спайс, Байрон. Исследователи помогают разработать полноразмерный автономный вертолет В архиве 2011-06-08 на Wayback Machine Карнеги Меллон, 6 июля 2010 г. Дата обращения: 19 июля 2010 г.
- ^ Коски, Оливия. Во-первых, полноразмерный робот-коптер летает без помощи человека Проводной, 14 июля 2010 г. Дата обращения: 19 июля 2010 г.
- ^ «Измерение объема». 3dlasermapping.com. Архивировано из оригинал на 2014-04-04. Получено 2014-02-17.
- ^ Модульные горные системы # Автономные системы транспортировки
- ^ а б Харгитай, Хенрик; Виллнер, Конрад; Бухройтнер, Манфред (2019), Харгитай, Хенрик (ред.), «Методы планетарного топографического картирования: обзор», Планетарная картография и ГИС, Конспект лекций по геоинформации и картографии, Springer International Publishing, стр. 147–174, Дои:10.1007/978-3-319-62849-3_6, ISBN 978-3-319-62849-3
- ^ НАСА. Марсианский спускаемый аппарат НАСА видит падающий снег, данные о почве указывают на жидкое прошлое NASA.gov (29 сентября 2008 г.). Проверено 9 ноября 2008 года.
- ^ «Облачно-аэрозольный лидар с ортогональной поляризацией (КАЛИОП)». НАСА. Получено 16 августа 2015.
- ^ CW Gowers. «В центре внимания: диагностика лидар-томсоновского рассеяния на JET» JET.EFDA.org (без даты). Проверено 8 августа 2007 года. В архиве 18 сентября 2007 г. Wayback Machine
- ^ Riquelme, A.J .; Abellán, A .; Tomás, R .; Джабоедофф, М. (2014). «Новый подход к полуавтоматическому распознаванию стыков горных массивов из трехмерных облаков точек» (PDF). Компьютеры и науки о Земле. 68: 38–52. Bibcode:2014CG ..... 68 ... 38R. Дои:10.1016 / j.cageo.2014.03.014. HDL:10045/36557.
- ^ Gigli, G .; Касагли, Н. (2011). «Полуавтоматическое извлечение структурных данных горного массива из облаков точек LIDAR высокого разрешения». Международный журнал механики горных пород и горных наук. 48 (2): 187–198. Дои:10.1016 / j.ijrmms.2010.11.009.
- ^ а б c Слоб, С. 2010. Автоматизированная характеристика массива горных пород с использованием наземного трехмерного лазерного сканера, Делфский технический университет.
- ^ Riquelme, A.J .; Abellán, A .; Томас, Р. (2015). «Анализ интервалов неоднородностей в горных массивах с использованием трехмерных облаков точек». Инженерная геология. 195: 185–195. Дои:10.1016 / j.enggeo.2015.06.009. HDL:10045/47912.
- ^ а б c Sturzenegger, M .; Стед, Д. (2009). «Наземная цифровая фотограмметрия ближнего действия и наземное лазерное сканирование для определения характеристик несплошностей на выемках горных пород». Инженерная геология. 106 (3–4): 163–182. Дои:10.1016 / j.enggeo.2009.03.004.
- ^ Рикельме, Адриан; Томас, Роберто; Кано, Мигель; Пастор Хосе Луис; Абеллан, Антонио (24 мая 2018 г.). «Автоматическое картирование стойкости неоднородностей в горных массивах с использованием трехмерных облаков точек» (PDF). Горная механика и горная инженерия. 51 (10): 3005–3028. Bibcode:2018RMRE ... 51.3005R. Дои:10.1007 / s00603-018-1519-9. ISSN 0723-2632. S2CID 135109573.
- ^ Рикельме, Адриан Дж .; Томас, Роберто; Абеллан, Антонио (2016-04-01). «Характеристика откосов горных пород путем оценки массы откосов с использованием трехмерных облаков точек». Международный журнал механики горных пород и горных наук. 84: 165–176. Дои:10.1016 / j.ijrmms.2015.12.008. HDL:10045/52313.
- ^ Abellán, A .; Оппикофер, Т .; Jaboyedoff, M .; Россер, штат Нью-Джерси; Lim, M .; Лато, М.Дж. (2014). «Наземное лазерное сканирование неустойчивостей горных склонов». Процессы земной поверхности и формы рельефа. 39 (1): 80–97. Bibcode:2014ESPL ... 39 ... 80A. Дои:10.1002 / esp.3493.
- ^ Abellán, A .; Vilaplana, J.M .; Мартинес, Дж. (2006). «Применение наземного лазерного сканера дальнего действия для детального исследования камнепадов в Валль-де-Нурия (Восточные Пиренеи, Испания)». Инженерная геология. 88 (3–4): 136–148. Дои:10.1016 / j.enggeo.2006.09.012.
- ^ Tomás, R .; Abellán, A .; Кано, М .; Riquelme, A .; Tenza-Abril, A.J .; Baeza-Brotons, F .; Saval, J.M .; Джабоедофф, М. (2017-08-01). «Междисциплинарный подход к исследованию распространения горной породы на городском склоне». Оползни. 15 (2): 199–217. Дои:10.1007 / s10346-017-0865-0. ISSN 1612-510X.
- ^ "Лидар | Программа НАСА по воздушным наукам". airbornescience.nasa.gov. Получено 2017-03-20.
- ^ «ИФТАС». Iftas.de. Получено 2013-05-06.
- ^ «Лидарные имитационные модели в Webots». Получено 2018-06-04.
- ^ «НАСА - Лидарный эксперимент по космическим технологиям (LITE)». Nasa.gov. 2011-08-25. Получено 2013-05-06.
- ^ D.M. Винкер; R.H. Couch; М.П. Маккормик (27 сентября 2011 г.). «Обзор LITE: Лидарный космический эксперимент НАСА». Труды IEEE. 84 (2): 164–180. Дои:10.1109/5.482227.
- ^ Брюс Банердт, Орбитальный лазерный высотомер, Марсианские хроники, том 1, № 3, NASA.gov. Проверено 11 марта 2019.
- ^ НАСА, ЛОЛА. Проверено 11 марта 2019.
- ^ Джон Ф. Кавано, и другие., "Лазерный высотомер Mercury для миссии MESSENGER ", Космическая наука Rev, DOI 10.1007 / s11214-007-9273-4, 24 августа 2007 г. Дата обращения 11 марта 2019 г.
- ^ Шульвич, Якуб; Бурдзяковский, Павел; Яновский, Артур; Пшиборский, Марек; Тисёнц, Павел; Войтович, Александр; Холодков, Артхем; Матысик, Кшиштоф; Матысик, Мацей (2015). «Морское лазерное сканирование как источник пространственных данных». Польские морские исследования. 22 (4): 9–14. Дои:10.1515 / помр-2015-0064.
- ^ «Батиметрический лидар». home.iitk.ac.in. Получено 2018-01-17.
- ^ Вулдер, Майкл А; Батер, Кристофер В. Купс, Николас С; Хилкер, Томас; Белый, Джоан С (2008). «Роль LiDAR в устойчивом лесопользовании». Хроники лесного хозяйства. 84 (6): 807–826. CiteSeerX 10.1.1.728.1314. Дои:10.5558 / tfc84807-6. ISSN 0015-7546.
- ^ https://www.airborneresearch.org.au/fires-2020
- ^ «CivilMaps.com ускоряет обследование состояния дорог и дорожного покрытия». Гражданские карты. 2015-03-15. Архивировано из оригинал на 2015-04-02. Получено 2015-03-15.
- ^ «Лазеры на бампере». Sciencedaily.com. 2007-02-27. Получено 2013-05-06.
- ^ Министерство торговли США (14 ноября 2008 г.). «План внедрения автоматизированной системы приземных наблюдений (ASOS)» (PDF). weather.gov.
- ^ Клайв, П. Дж. М., Windpower 2.0: технологии решают задачи В архиве 2014-05-13 в Wayback Machine Environment Research Web, 2008. Дата обращения: 9 мая 2014.
- ^ Миккельсен, Торбен; и другие. (Октябрь 2007 г.). «Эксперимент с револьвером на 12 МВт» (PDF). Рисо. Архивировано из оригинал (PDF) на 2011-07-03. Получено 2010-04-25.
- ^ «Жжение от ветра». Экономист. 2010-03-04. Получено 2010-04-25.
- ^ «Первый в мире контроль ветряной турбины с помощью лидарной системы на основе гондолы». Штутгартский университет корпоративных коммуникаций. 2012-06-05. Получено 2014-04-12.
- ^ Эндрю К. Шолброк и др. Полевые испытания системы управления с прямой связью на основе лидаров на турбине передовых исследований NREL Controls База данных Национальной лаборатории возобновляемых источников энергии, 12 апреля 2014. Дата обращения: 12 апреля 2014.
- ^ Миккельсен, Торбен и Хансен, Каспер Хьорт и др. Лидарные измерения скорости ветра с вращающейся блесны Датская исследовательская база данных и Датский технический университет, 20 апреля 2010. Дата обращения: 25 апреля 2010.
- ^ Асимакополус М., Клайв П. Дж. М., Мор Г. и Боддингтон Р., Измерение и визуализация морской зоны сжатия В архиве 2014-05-12 в Wayback Machine Ежегодная конференция Европейской ассоциации ветроэнергетики, 2014 г. Дата обращения: 9 мая 2014 г.
- ^ Галлахер, Д., и Мор, Г., Лидарные измерения и визуализация турбулентности и длины затухания следа В архиве 2014-05-12 в Wayback Machine Ежегодная конференция Европейской ассоциации ветроэнергетики, 2014 г. Дата обращения: 9 мая 2014 г.
- ^ Клайв, П. Дж. М. и др., Испытания кривой мощности на суше для оценки затрат на сушу: практический пример В архиве 2014-05-12 в Wayback Machine Ежегодная конференция Европейской ассоциации ветроэнергетики, 2014 г. Дата обращения: 9 мая 2014 г.
- ^ Клайв, П. Дж. М., Оценка морских энергетических характеристик для береговых затрат В архиве 2014-04-17 в Wayback Machine DEWEK (Deutsche Windenergie Konferenz), 2012. Дата обращения: 9 мая 2014.
- ^ Лукач, Нико; Štumberger Gorazd; Жалик Борут (2017). «Оценка ветровых ресурсов с использованием данных LiDAR с воздуха и сглаженной гидродинамики частиц». Экологическое моделирование и программное обеспечение. 95: 1–12. Дои:10.1016 / j.envsoft.2017.05.006.
- ^ Йохем, Андреас; Хёфле Бернхард; Рутцингер Мартин; Пфайфер Норберт (2009). «Автоматическое обнаружение и анализ плоскости крыши в облаках точек с помощью лидарных измерений для оценки солнечного потенциала». Датчики. 9 (7): 5241–5262. Дои:10,3390 / с90705241. ЧВК 3274168. PMID 22346695.
- ^ Nguyen, Ha T .; Пирс, Джошуа М .; Харрап, Роб; Барбер, Джеральд (2012). «Применение LiDAR для оценки потенциала развертывания солнечных фотоэлектрических систем на крыше муниципального района». Датчики. 12 (4): 4534–4558. Дои:10,3390 / с120404534. ЧВК 3355426. PMID 22666044.
- ^ Nguyen, Ha T .; Пирс, Джошуа М. (2012). «Учет потерь затенения в оценке солнечного фотоэлектрического потенциала в муниципальном масштабе». Солнечная энергия. 86 (5): 1245–1260. Bibcode:2012Соен ... 86.1245N. Дои:10.1016 / j.solener.2012.01.017. S2CID 15435496.
- ^ Йохем, Андреас; Хёфле Бернхард; Рутцингер Мартин (2011). «Извлечение вертикальных стен из данных мобильного лазерного сканирования для оценки солнечного потенциала». Дистанционное зондирование. 3 (4): 650–667. Bibcode:2011RemS .... 3..650J. Дои:10.3390 / RS3030650.
- ^ Лукач, Нико; Олаус Даниэль; Семе Семе; Жалик Борут; Штумбергер Горазд (2013). «Оценка поверхностей крыш с точки зрения их солнечного потенциала и пригодности для фотоэлектрических систем на основе данных LiDAR». Прикладная энергия. 102: 803–812. Дои:10.1016 / j.apenergy.2012.08.042.
- ^ «rFactor Pro - Небеса лазерного сканирования». VirtualR.net - Новости 100% независимых симуляторов. 2011-07-15. Получено 2020-06-04.
- ^ Марш, Уильям (2017-06-30). "rFactor Pro демонстрирует LIDAR-сканирование Hungaroring". Sim Racing Paddock. Получено 2020-06-04.
- ^ «Новые треки в Project CARS 2 были просканированы с помощью дронов». GTPlanet. 2017-02-08. Получено 2020-06-04.
- ^ Ник Пэриш (13 июля 2008 г.). «От компьютера OK к компьютеру Roll: Radiohead и режиссер Джеймс Фрост снимают видео без камер». Творческий подход. Архивировано из оригинал 17 июля 2008 г.
дальнейшее чтение
- Гил, Эмилио; Льоренс, Хорди; Ллоп, Хорди; Фабрегас, Ксавье; Галларт, Монтсеррат (2013). "Использование наземного датчика LIDAR для обнаружения сноса при опрыскивании виноградников ". Датчики. 13 (1): 516–534. Дои: 10.3390 / s130100516. ISSN 1424-8220. ЧВК 3574688. PMID 23282583.
- Наследие, Э. (2011). 3D-лазерное сканирование для наследия. Советы и рекомендации для пользователей по лазерному сканированию в археологии и архитектуре. Доступно на www.english-heritage.org.uk. 3D-лазерное сканирование для наследия | Историческая Англия
- Heritage, G., & Large, A. (ред.). (2009). Лазерное сканирование для наук об окружающей среде. Джон Вили и сыновья. ISBN 1-4051-5717-8
- Мальтамо М., Нессет Э. и Ваухконен Дж. (2014). Применение воздушного лазерного сканирования в лесном хозяйстве: концепции и практические примеры (том 27). Springer Science & Business Media. ISBN 94-017-8662-3
- Шан, Дж., И Тот, К. К. (ред.). (2008). Топографическая лазерная локация и сканирование: принципы и обработка. CRC Press. ISBN 1-4200-5142-3
- Воссельман, Г., и Маас, Х. Г. (ред.). (2010). Воздушное и наземное лазерное сканирование. Издательство Whittles. ISBN 1-4398-2798-2
внешние ссылки
- Национальное управление океанических и атмосферных исследований (NOAA) (15 апреля 2020 г.). "Что такое ЛИДАР?". Национальная океаническая служба NOAA.
- Центр координации и знаний LIDAR информации USGS (НАЖМИТЕ) - Веб-сайт, предназначенный для «облегчения доступа к данным, координации пользователей и обучения использованию лидарного дистанционного зондирования для научных нужд».
- Бесплатная онлайн-программа для просмотра лидарных данных
- Новости индустрии лидаров и образование