Соглашения об осях - Axes conventions
В баллистика и динамика полета, топоры соглашения стандартизированные способы определения местоположения и ориентации оси координат для использования в качестве точка зрения. Мобильные объекты обычно отслеживаются из внешнего кадра, который считается фиксированным. Для этих мобильных объектов могут быть определены другие кадры, чтобы иметь дело с относительным положением других объектов. Наконец, отношения или ориентации может быть описана взаимосвязью между внешним фреймом и фреймом, определенным для мобильного объекта.
Ориентация транспортного средства обычно называется отношение. Обычно это описывается ориентация фиксированной в теле кадра относительно фиксированной системы отсчета. Отношение описывается координаты отношения, и состоит как минимум из трех координат.[1]
Хотя с геометрической точки зрения различные методы описания ориентации определяются с использованием только некоторых опорных рамок, в инженерных приложениях важно также описать, как эти рамки прикреплены к лаборатории и движущемуся телу.
В связи с особой важностью международных конвенций по воздушным транспортным средствам несколько организаций опубликовали стандарты, которым необходимо следовать. Например, немецкий DIN опубликовал DIN 9300 норма для самолетов[2] (принят ISO как ISO 1151–2: 1985).
Условные обозначения осей, ограниченных землей

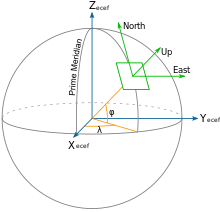
Мировые системы отсчета: ЕНУ и НЭД
В основном, в лабораторной системе отсчета или, существует два вида конвенции для кадров:
- Восток, Север, Вверх (ENU), используется в географии
- Север, Восток, Вниз (NED), используется специально в аэрокосмической отрасли
Этот кадр ссылается на w.r.t. Глобальные системы отсчета, такие как неинерциальная система Земля Центр Земля Фиксированная (ECEF).
Мировые системы отсчета для описания отношения
Чтобы установить стандартное соглашение для описания положений, требуется установить по крайней мере оси системы отсчета и оси твердого тела или транспортного средства. Когда используется неоднозначная система обозначений (например, Углы Эйлера ) также следует указать используемое соглашение. Тем не менее, наиболее используемые обозначения (матрицы и кватернионы) однозначны.
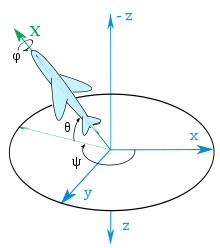
Углы Тейта – Брайана часто используются для описания положения транспортного средства по отношению к выбранной системе отсчета, хотя могут использоваться любые другие обозначения. Положительный Икс- ось в транспортных средствах всегда указывает по направлению движения. Для положительного у- и z-axis, мы должны столкнуться с двумя разными соглашениями:
- В случае наземных транспортных средств, таких как автомобили, цистерны и т. Д., Которые используют систему ENU (Восток-Север-Вверх) в качестве внешней ссылки (Мировая рамка), положительный у- или ось тангажа всегда указывает влево, а положительный z- или ось рыскания всегда направлена вверх. Начало отсчета мира фиксируется в центре тяжести транспортного средства. [3]
- Напротив, в случае воздушных и морских транспортных средств, таких как подводные лодки, корабли, самолеты и т. Д., Которые используют систему NED (Северо-Восток-Вниз) в качестве внешней ссылки (Мировая рамка), положительный у- или ось тангажа всегда направлена вправо, а его положительный z- или ось рыскания всегда направлена вниз. Начало координат мира фиксируется в центре тяжести транспортного средства.
- Наконец, в случае космических аппаратов, таких как космические шаттлы и т. Д., Используется модификация последнего соглашения, когда положительные характеристики аппарата (тела) у- или ось тангажа снова всегда указывает вправо, а его положительная ось z или рысканья всегда указывает вниз, но «вниз» теперь может иметь два разных значения: если так называемый локальная рамка используется в качестве внешнего ориентира, его положительная ось z направлена «вниз» к центру Земли, как это происходит в случае ранее упомянутой системы NED,[4] но если инерциальная система отсчета используется как ссылка, его положительная ось Z теперь будет указывать на Северный небесный полюс, а его положительная ось абсцисс - к весеннему Равноденствие[5] или какой-либо другой эталонный меридиан.
Рамы на транспортных средствах
Специально для самолетов, эти рамы не должны согласовываться с земными шпангоутами по линии вверх-вниз. Необходимо согласовать, что означают ЕНУ и НЭД в данном контексте.
Условные обозначения для наземных транспортных средств

Для наземных транспортных средств их полную ориентацию описать редко, кроме случаев, когда речь идет о электронный контроль устойчивости или же спутниковая навигация. В этом случае обычно используется соглашение из соседнего рисунка, где RPY означает крен-тангаж-рыскание.
Условные обозначения для морских транспортных средств

Как и в случае с самолетами, для обозначения движение кораблей и катеров. Некоторые часто используемые слова были введены в морское судоходство. Например, рыскание угол или курс, имеет морской происхождение, что означает «отклонение от курса». Этимологически он связан с глаголом «идти».[6] Это связано с концепцией несущий. Обычно ему присваивается сокращенное обозначение ψ.[7]
Условные обозначения для местных систем отсчета воздушных судов


Координаты для описания отношения воздушного судна (товарная, высота и банк), как правило, даны по отношению к опорной раме управления, расположенной в башне управления, и, следовательно, Гумилева, по сравнению с положением контрольной башни на поверхности земли.
Координаты для описания наблюдений, сделанных с самолета, обычно задаются относительно его внутренних осей, но обычно в качестве положительных используются координаты, указывающие вниз, где расположены интересные точки. Следовательно, они обычно НЕД.
Эти оси обычно берутся так, что ось X - это продольная ось, направленная вперед, ось Z - это вертикальная ось, направленная вниз, а ось Y - это боковая ось, указывающая таким образом, что рамка правша.
В движение самолета часто описывается в терминах вращения вокруг этих осей, поэтому вращение вокруг Икс-ось называется качением, вращение вокруг Yось называется тангажем, а вращение вокруг Z- ось называется рысканием.
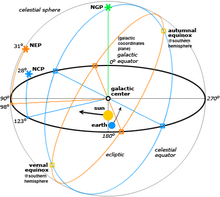
Для спутников, вращающихся вокруг Земли, нормально использовать Экваториальная система координат. Проекция экватора Земли на небесную сферу называется небесный экватор. Точно так же проекции северного и южного географических полюсов Земли становятся северным и южным. небесные полюса, соответственно.
Спутники дальнего космоса используют другие Система небесных координат, словно Система координат эклиптики.
Местные соглашения о космических кораблях как спутниках


Если цель - удерживать шаттл во время его орбиты в постоянном положении по отношению к небу, например для выполнения определенных астрономических наблюдений предпочтительным ориентиром является инерциальная система отсчета, а вектор угла RPY (0 | 0 | 0) описывает положение, при котором крылья шаттла остаются постоянно параллельными земному экватору, а его нос постоянно указывает на весенний равноденствие, и брюхом к северу полярная звезда (см. рисунок). (Обратите внимание, что ракеты и ракеты чаще следуют соглашениям для самолетов, где вектор угла RPY (0 | 0 | 0) указывает на север, а не на точку весеннего равноденствия).
С другой стороны, если цель состоит в том, чтобы удерживать шаттл во время его орбиты в постоянном положении по отношению к поверхности Земли, предпочтительным эталоном будет локальная рамка, с вектором угла RPY (0 | 0 | 0), описывающим положение, при котором крылья шаттла параллельны поверхности земли, его нос указывает на его курс, а брюшко вниз - к центру Земли (см. рисунок).
Рамки, используемые для описания отношения
Обычно кадры, используемые для описания локальных наблюдений транспортного средства, представляют собой те же кадры, которые используются для описания его положения по отношению к наземным станциям слежения. то есть, если кадр ENU используется в станции слежения, на борту также используются кадры ENU, и эти кадры также используются для ссылки на местные наблюдения.
Важным случаем, к которому это не относится, является самолет. Наблюдения с самолета выполняются сверху вниз, поэтому обычно применяется соглашение об осях NED. Тем не менее, когда даны отношения к наземным станциям, используется взаимосвязь между местным кадром, привязанным к земле, и бортовым кадром ENU.
Смотрите также
- Динамика отношения и контроль (космический корабль)
- Теорема Эйлера вращения
- Гироскоп
- Метод триады
- Формализмы вращения в трех измерениях
- Географическая система координат
- Астрономические системы координат
Рекомендации
- ^ Ханспетер Шауб, Джон Л. Джанкинс (2003). «Кинематика жесткого тела». Аналитическая механика космических систем. Американский институт аэронавтики и астронавтики. п. 71. ISBN 1-56347-563-4.
- ^ Luft- und Raumfahrt; Begriffe, Größen und Formelzeichen der Flugmechanik; Bewegungen des Luftfahrzeugs und der Atmosphäre gegenüber der Erde [1]
- ^ NavCommand. Программное обеспечение для работы и настройки инерциальных измерительных и геодезических систем iMAR. Инструкция по эксплуатации и эксплуатации. Санкт-Ингберт 2007, стр.11–12. http://www.imar-navigation.de/download/nav_command_en.pdf В архиве 2006-09-23 на Wayback Machine
- ^ Исследование: Местное задание Orbiter Attitude (18 сентября 1995 г.) «Архивная копия». Архивировано из оригинал на 2007-07-14. Получено 2010-10-08.CS1 maint: заархивированная копия как заголовок (связь) (статья недоступна с 2007 года)
- ^ Исследование: Инерциальное Orbiter Attitude (3 октября 1995 г.) «Архивная копия». Архивировано из оригинал на 2007-07-14. Получено 2010-10-08.CS1 maint: заархивированная копия как заголовок (связь) (статья недоступна с 2007 года)
- ^ Этимология онлайн-словарь В архиве 15 ноября 2010 г. Wayback Machine
- ^ Хёрт, Х. Х., младший (январь 1965 г.) [1960]. Аэродинамика для морских авиаторов. Типография правительства США, Вашингтон, округ Колумбия: ВМС США, Отдел авиационной подготовки. п. 284. НАВВЭПС 00-80Т-80.